

A dynamic modeling and stable control method of a folding wing aircraft
A stable control method and dynamic modeling technology, applied in the direction of electric controllers, controllers with specific characteristics, etc., can solve the problems of low control accuracy, no consideration of large-angle maneuvering, model linearization, etc., to overcome limitations , the effect of avoiding model linearization problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
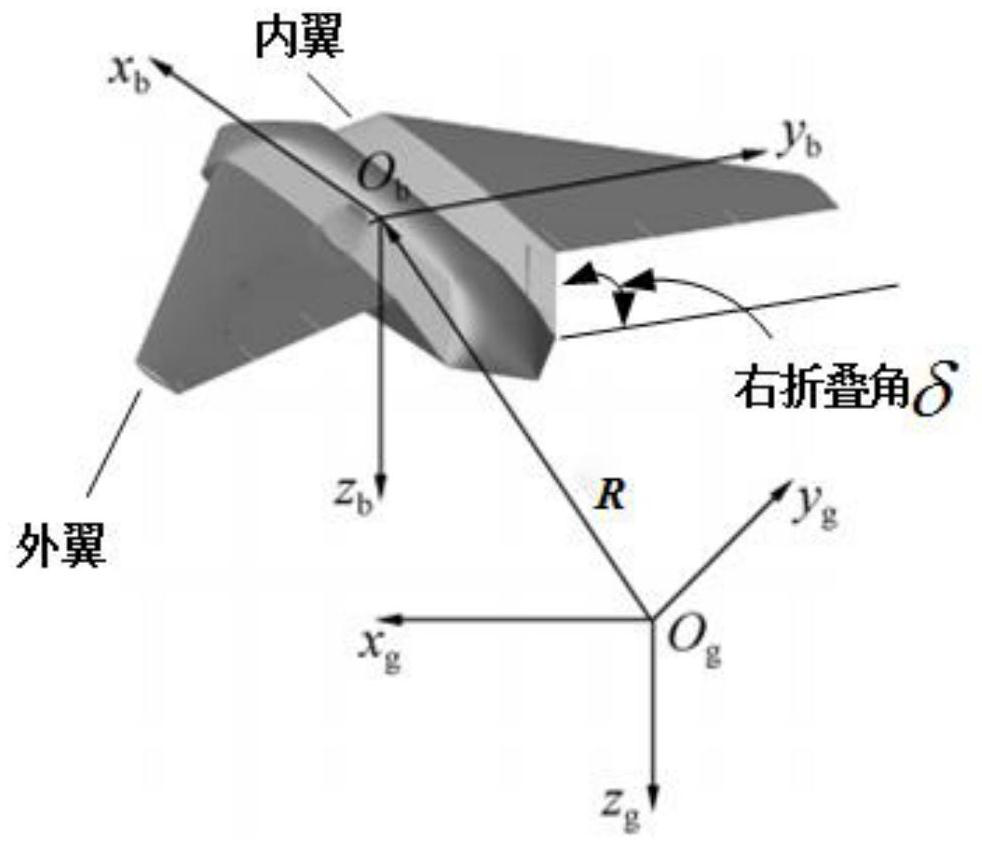
[0132] for figure 1 For the folding-wing aircraft shown in , according to the specific steps of the dynamic modeling provided by the above-mentioned invention, the dynamic model of the folding-wing aircraft is established, and the specific parameters of the aircraft are as follows in Table 1:
[0133]
[0134]
[0135] Table 1
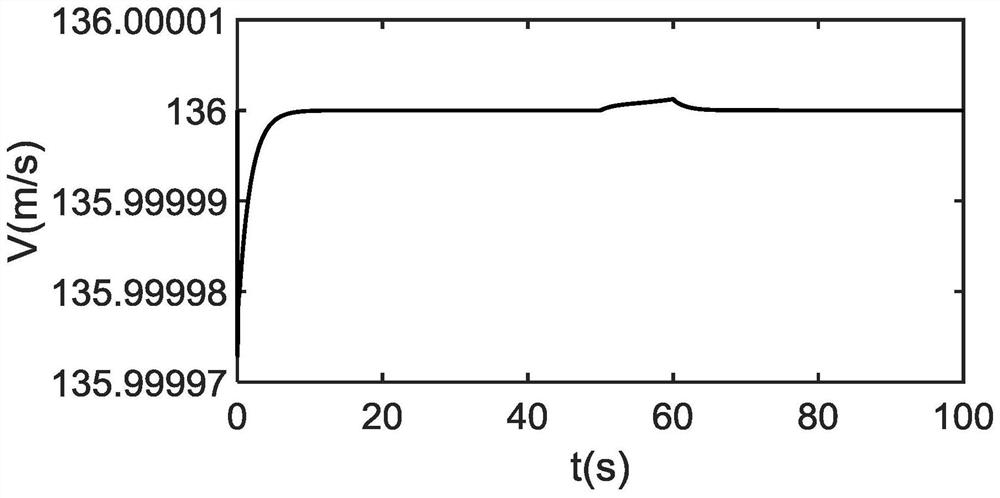
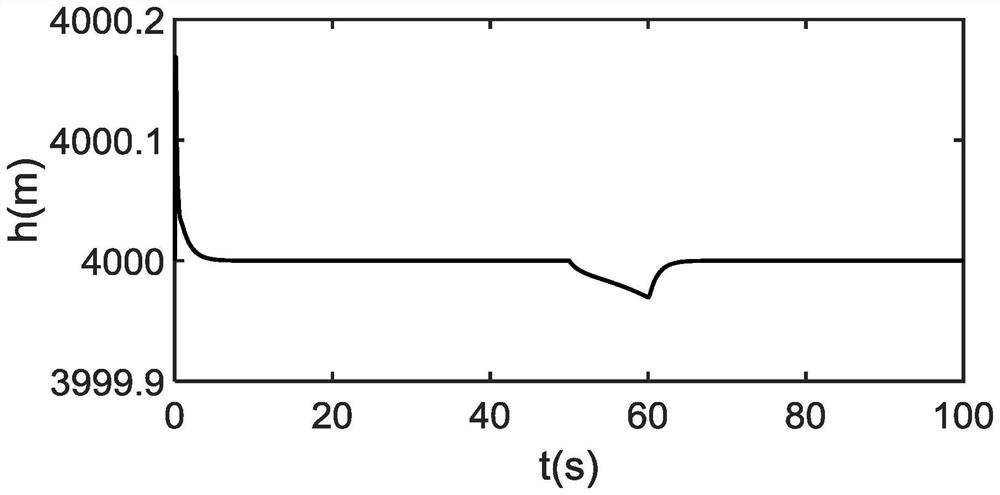
[0136] The deformation process is as follows: at 50s, the wing is folded 60° at an angular velocity of 6° / s, wherein the inner wing is folded relative to the body, and the outer wing is always kept horizontal relative to the body. Given the command speed and command altitude of the aircraft, select the control parameters as shown in Table 2:
[0137]
[0138] Table 2
[0139] image 3 The speed change of the aircraft under the action of the controller is given. It can be seen from the figure that at the beginning of the deformation, the speed will increase slightly. After the deformation is over, the speed can return to the command speed va...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More