

Automatic calibration and registration method for livestock three-dimensional reconstruction mobile equipment
A 3D reconstruction and automatic calibration technology, applied in character and pattern recognition, image data processing, instruments, etc., can solve problems such as inability to quickly and accurately complete multi-point cloud registration, high accuracy, and fast registration speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
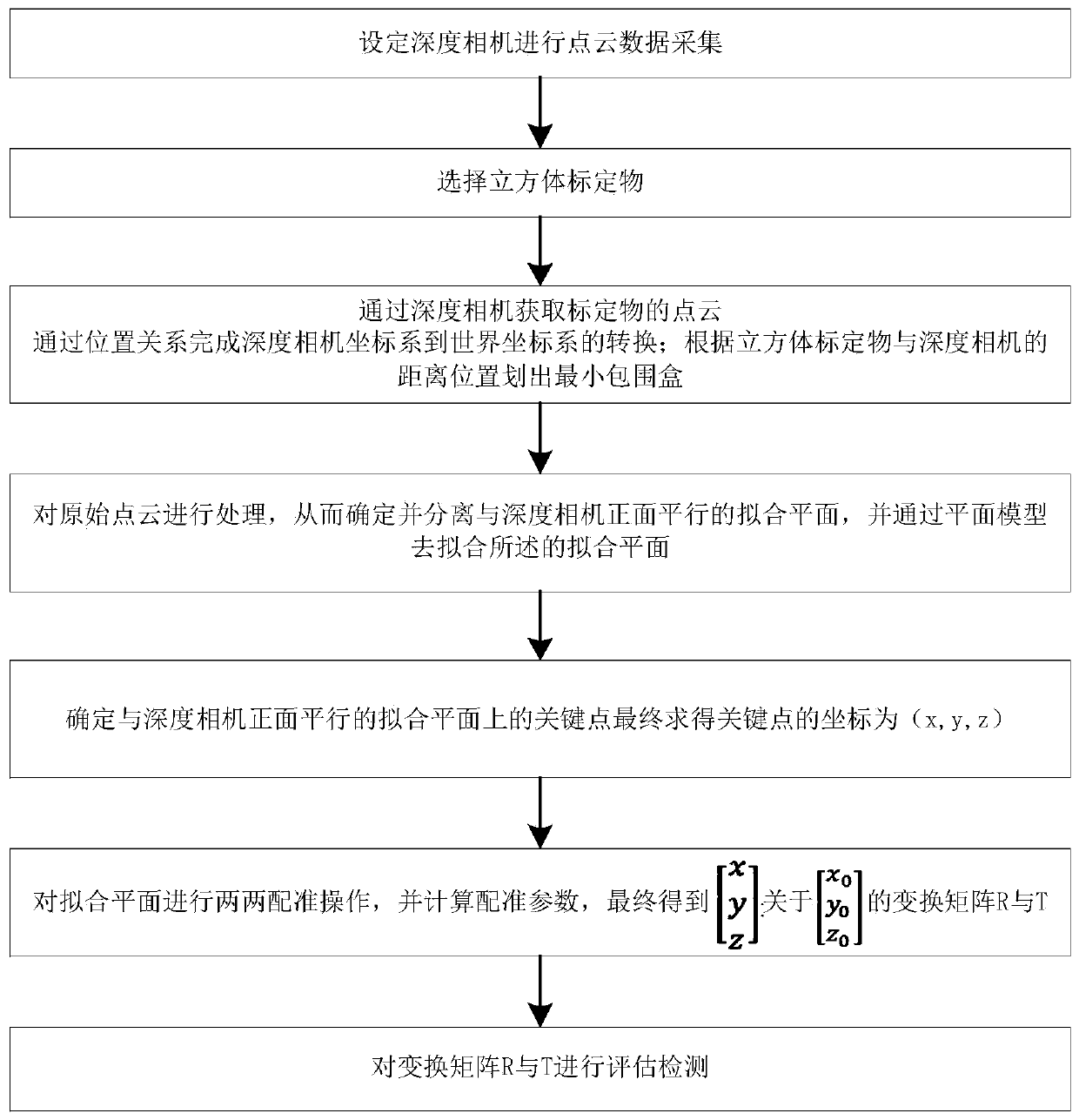
[0082] Such as figure 1 As shown, an automatic calibration and registration method for a livestock three-dimensional reconstruction mobile device, which specifically includes the following steps:
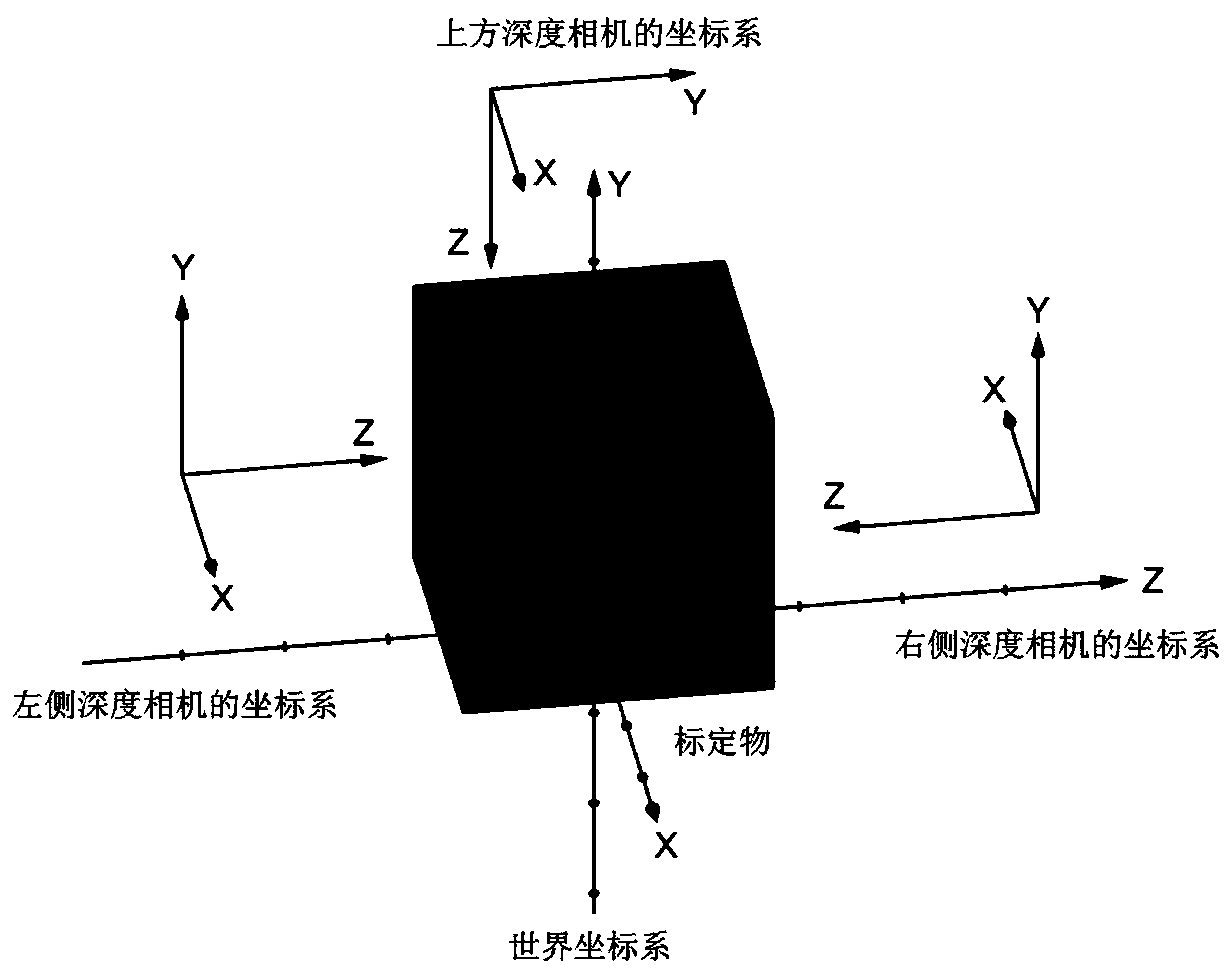
[0083] Step S1: Fix the three depth cameras on the top, left and right sides of the livestock passage to be measured respectively, which are respectively called the upper depth camera, the left depth camera and the right depth camera. The contour information of the upper part and the right part, where the local coordinate systems of the three depth cameras are respectively, the upper camera (x t ,y t ,z t ), the left camera (x l ,y l ,z l ), the right camera (x r ,y r ,z r ). In order to facilitate observation and registration, the specified world coordinate system is consistent with the left camera coordinate system, such as figure 2 shown.
[0084] Step S2: In this embodiment, a high-precision cube calibration object is selected. The cube calibration object has a lengt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More