

Intelligent unmanned chariot position loss finding method based on fog calculation
A fog computing and chariot technology, which is applied in the field of fog computing-based intelligent unmanned chariot position loss and recovery, which can solve problems such as detachment, loss of unmanned chariot connection, and loss of control of control groups.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings. Here, the exemplary embodiments and descriptions of the present invention are used to explain the present invention, but not to limit the present invention.
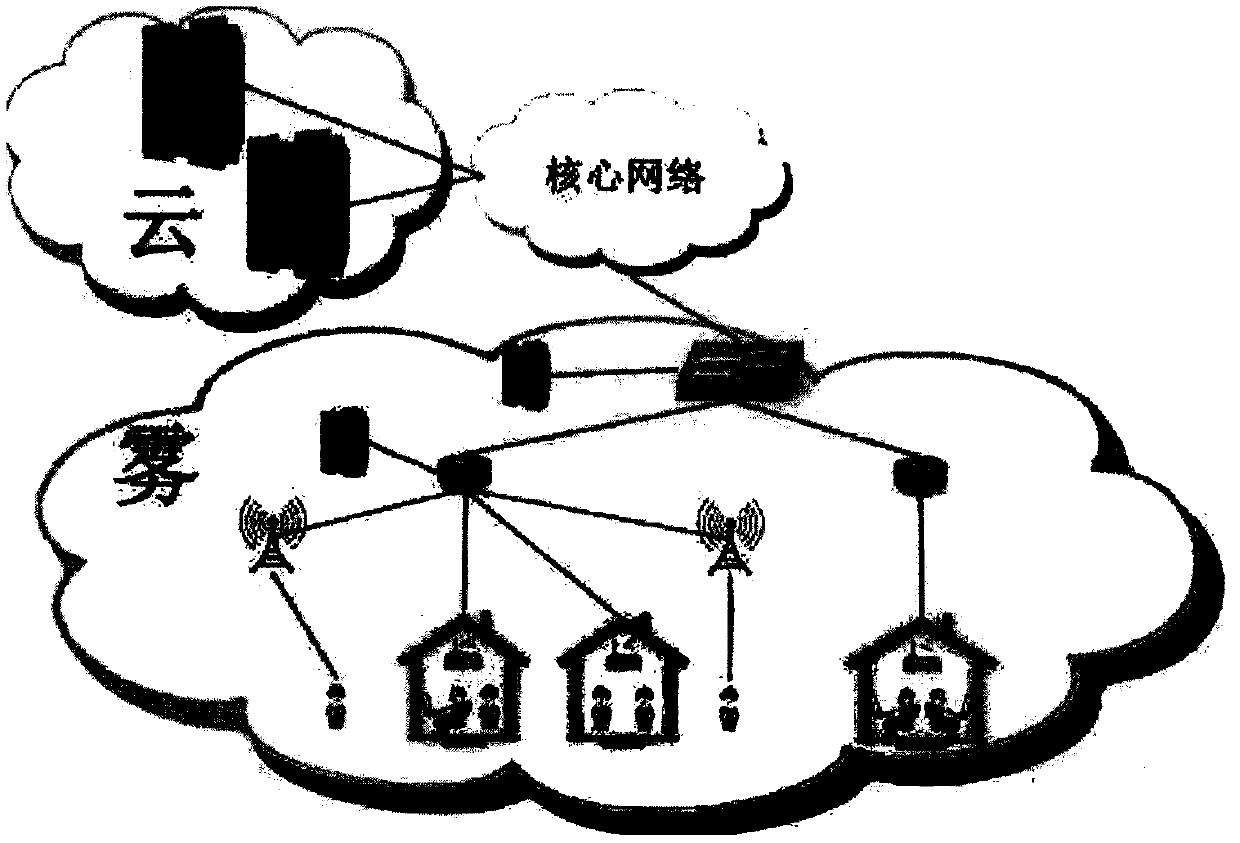
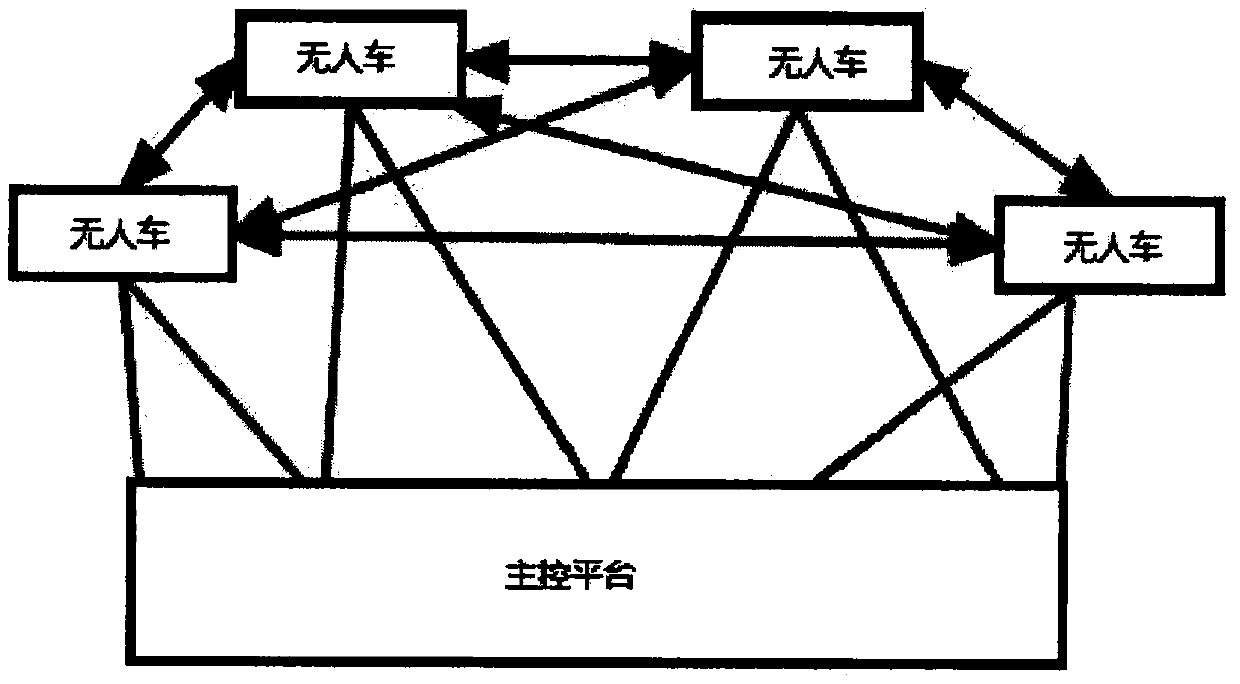
[0021] This embodiment provides the location information of the intelligent unmanned combat vehicle that calculates the lost location for the fog, and its specific implementation principle process flow is as follows Figure 5 As shown, the intelligent unmanned combat vehicle group adopts the control method based on fog computing. The main control unit controls each intelligent unmanned combat vehicle from a global perspective according to the information and control algorithms of all intelligent unmanned combat vehicles. Human combat vehicles can form formations with their adjacent intelligent ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More