

Route dynamic allocation method and equipment for unmanned sweeper and medium
An unmanned, dynamic distribution technology, applied in the field of sweepers, can solve problems such as incompletion and delay in operation, and achieve the effect of efficient cleaning process and avoid delay or incompletion of operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below, the present invention will be further described in conjunction with the accompanying drawings and specific implementation methods. It should be noted that, under the premise of not conflicting, the various embodiments described below or the technical features can be combined arbitrarily to form new embodiments. .
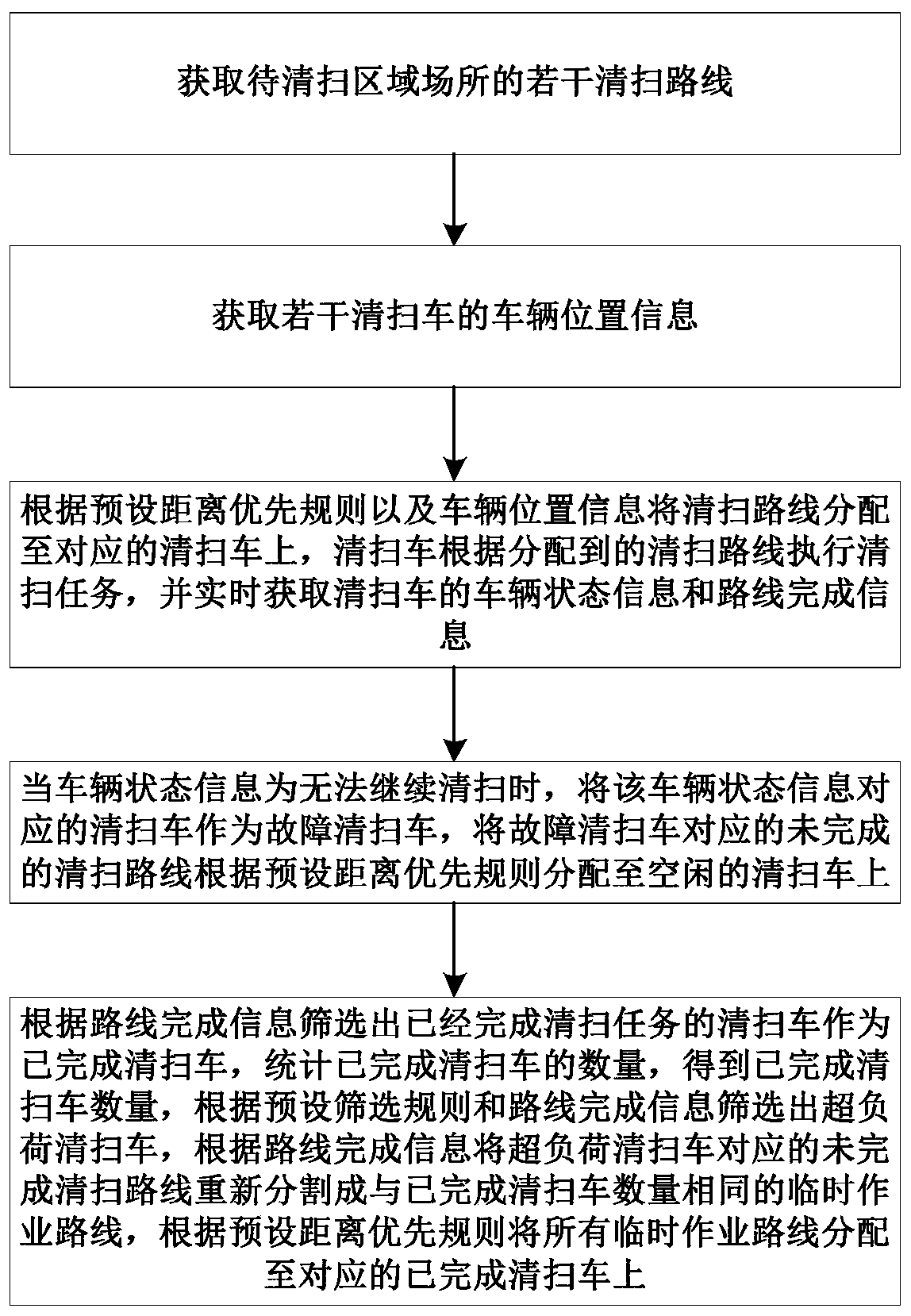
[0030] Such as figure 1 As shown, a kind of route dynamic allocation method of unmanned cleaning vehicle of the present invention, comprises the following steps:
[0031] Route acquisition, obtain several cleaning routes of the area to be cleaned;
[0032] Acquisition of the vehicle position is to obtain the vehicle position information of several sweeping vehicles; in this embodiment, the vehicle position information of each sweeping vehicle is obtained through the GPS positioning method.
[0033] For the initial allocation, the cleaning route is assigned to the corresponding sweeper according to the preset distance priority rule and vehicle locatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More