

Unmanned aerial vehicle CSMA access method based on adaptive adjustment strategy
An adaptive adjustment and access method technology, applied in machine learning, wireless communication, radio transmission system, etc., can solve the problems of low collision rate, high throughput, poor adaptability, etc., and achieve a balance between reasonable complexity and communication overhead Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
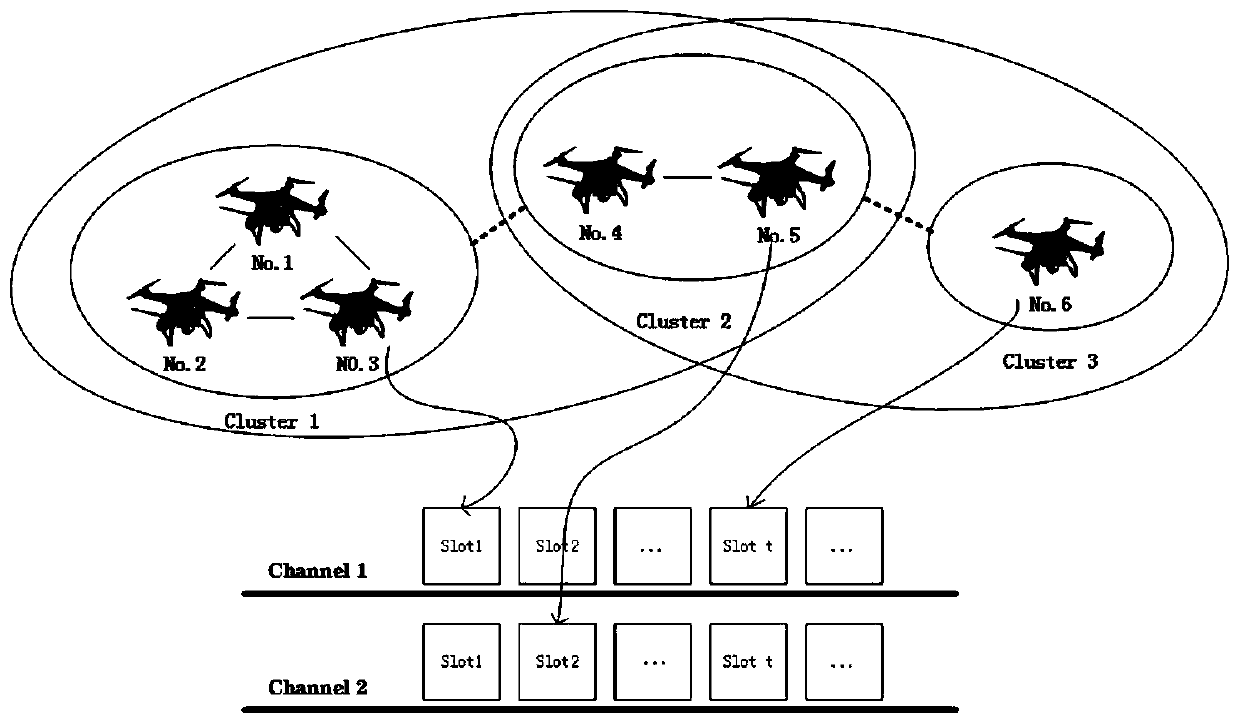
[0043] The embodiment of the present invention first introduces the UAV self-organizing network model:
[0044] Consider an ad hoc network composed of N UAV nodes, which is divided into W clusters. The UAV node set is expressed as A collection of clusters is expressed as UAV nodes in different clusters share limited channel resources. M (M The time slot division of each channel is expressed as When each drone node has data to send, it will select an available channel for access in a certain time slot. Interference collision occurs when two or more nodes choose to access the same channel in the same time slot.
[0045] Access interference can be divided into two categories: intra-cluster interference and inter-cluster interference. References Chen J, Wu Q, Xu Y, et al. Distributed Demand-aware Channel-slot Selection for Multi-UAV Networks: AGame-theoretic Learning Approach [J]. IEEE Access, 2018, PP(99): 1-1. , the present invention can define the interference domains ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More