

A Path Planning Method Based on Concentric Circle Sampling Guided RRT Algorithm
A technology of path planning and concentric circles, which is applied in navigation, surveying and navigation, road network navigator, etc., can solve problems affecting algorithm speed, lack of guidance information, and path failure, etc., so as to improve pathfinding efficiency and wide application Foreground, strong practical effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
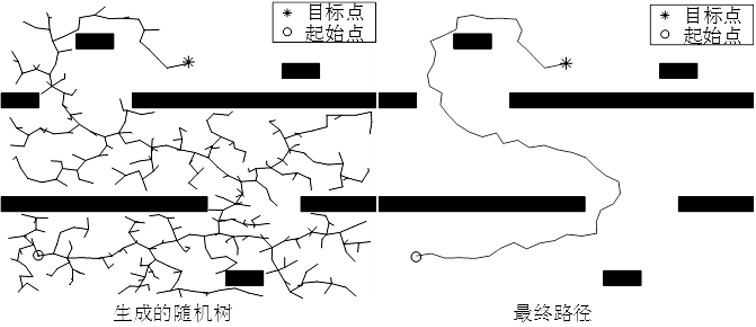
[0038] In this embodiment, it is assumed that the scope of the planning map is 1000*1000, the starting point of path planning is (100,150), the target point is (500,800), and the obstacle position is as Figure 4 shown.
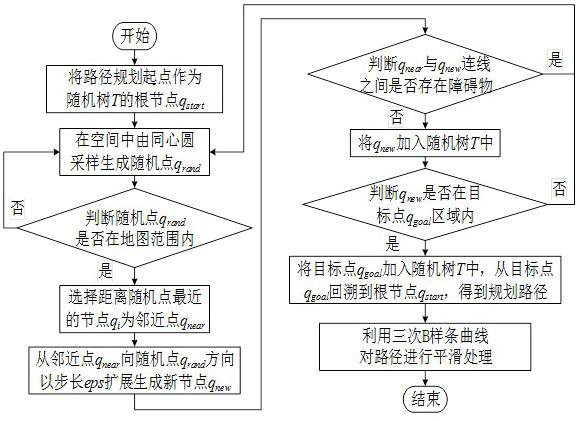
[0039] The path planning method based on the concentric circle sampling guided RRT algorithm provided by the present invention, such as figure 1 As shown in , based on the starting point, target point, obstacle position and planning map of the above-mentioned planned path, the path planning is carried out according to the following steps:
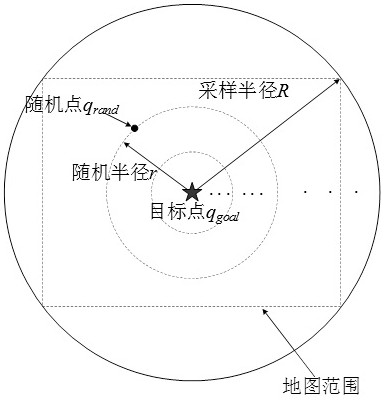
[0040] Step 1: Define the concentric circle coefficient m as 1.5, define the expansion step eps as 40 unit length, and take the starting point of the path planning as the root node q of the random tree T start , and use it as the parent node for the next expansion of the random ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More