

Dual-purpose bionic soft actuator
A technology of actuators and software, which is applied in the field of dual-purpose bionic software actuators, can solve the problem of single function of the end effector, and achieve the effect of saving costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Describe technical scheme of the present invention in detail below in conjunction with accompanying drawing and embodiment:
[0026] Observing the process of the grebe running on the water surface, it can be found that when it treads on the water, its webbed feet provide a good contact area and provide enough reaction force for its running; while when it comes out of the water, the webbed feet can Shrinks under resistance to reduce water resistance. This way of foot deformation provides a strong guarantee for its ability to run on water.
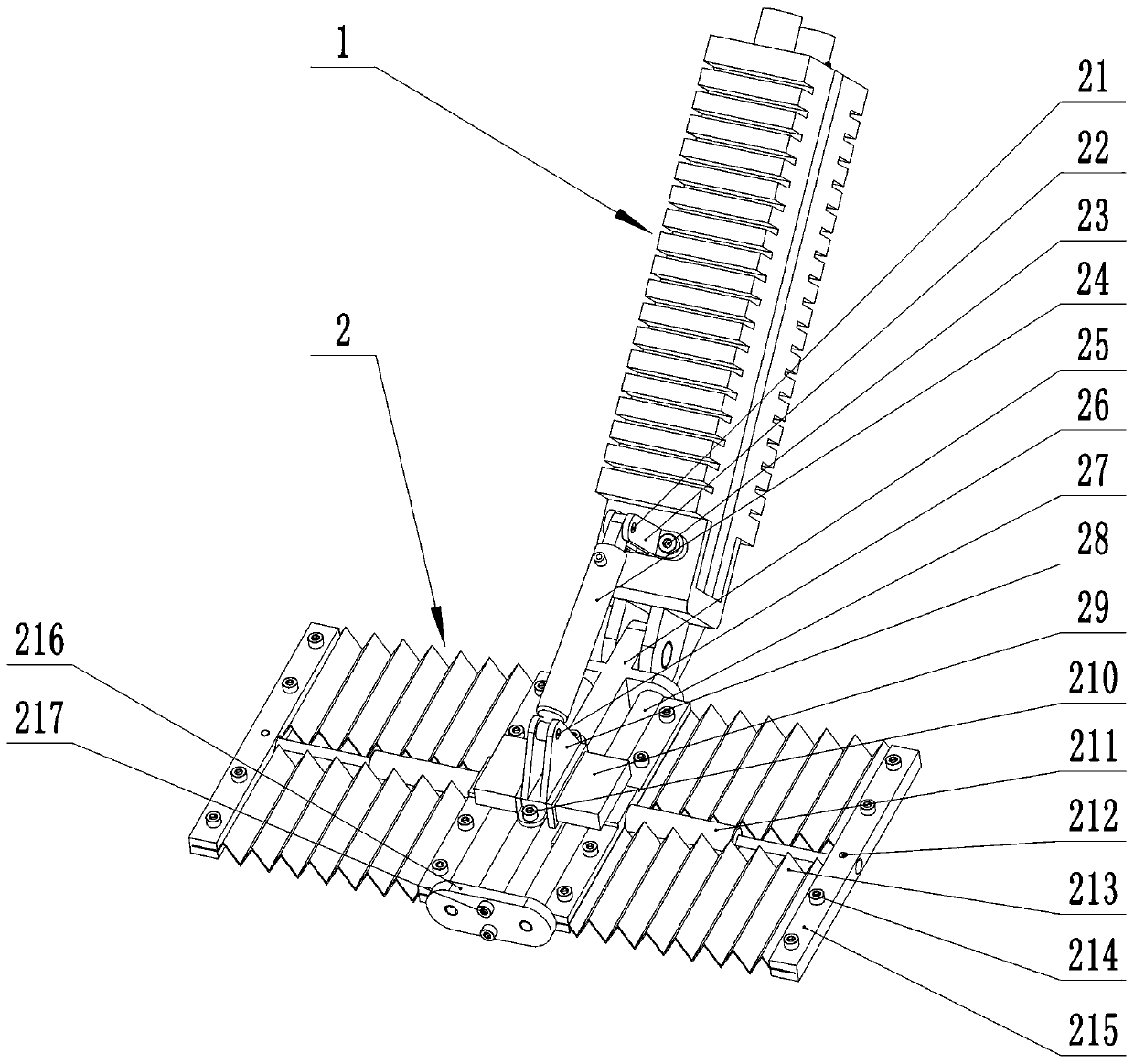
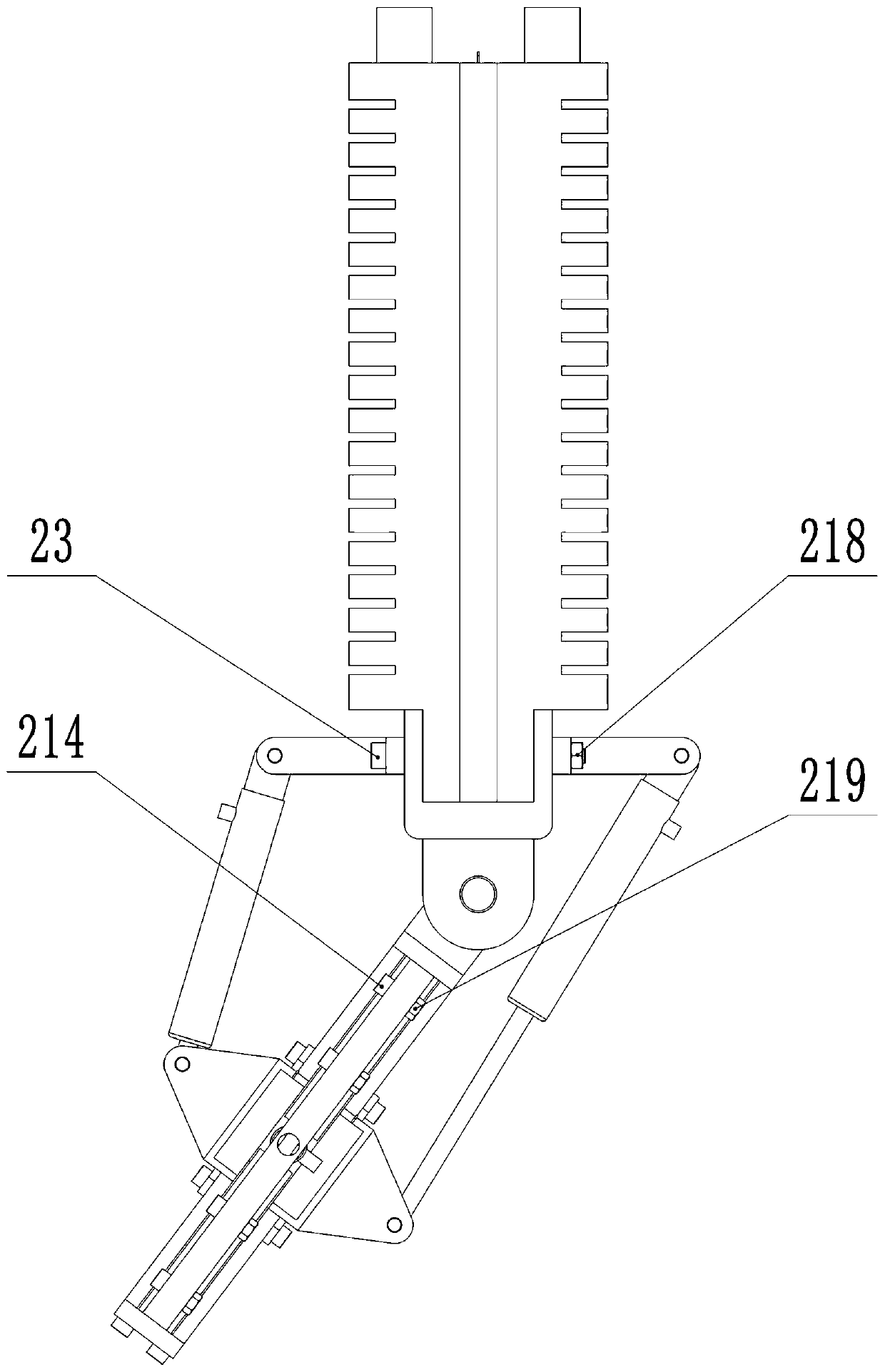
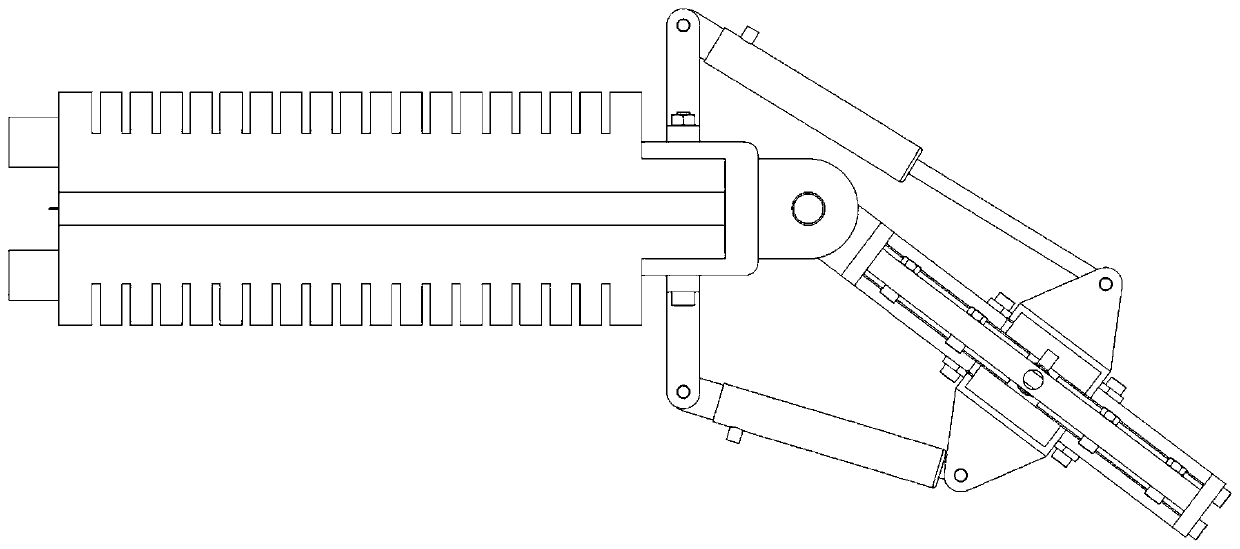
[0027] see Figure 1 to Figure 8 As shown, the present embodiment is a dual-purpose biomimetic soft actuator, which includes two parts, the first driving module 1 and the second driving module 2 . When the actuator is in the grebe-like water running mode (as the end effector of the water running robot), the second drive module 2 plays the main driving role; when the actuator is in the fish-like swimming mode (as the water swimming r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More