

A bionic robot spine mechanism and bionic robot
A bionic robot and spine technology, applied in the field of spine mechanism, can solve the problems of reduced flexibility, disadvantages and lack of energy utilization of large stride functions, and achieve the effects of improving stability, reducing impact force, and improving buffering and energy saving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
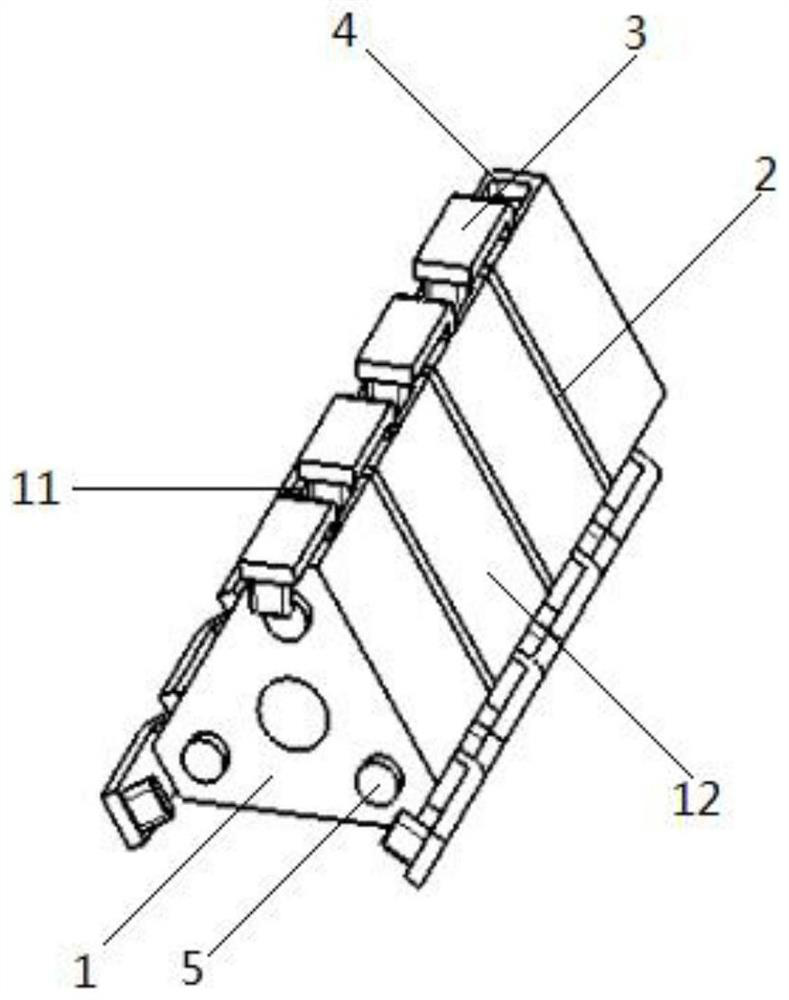
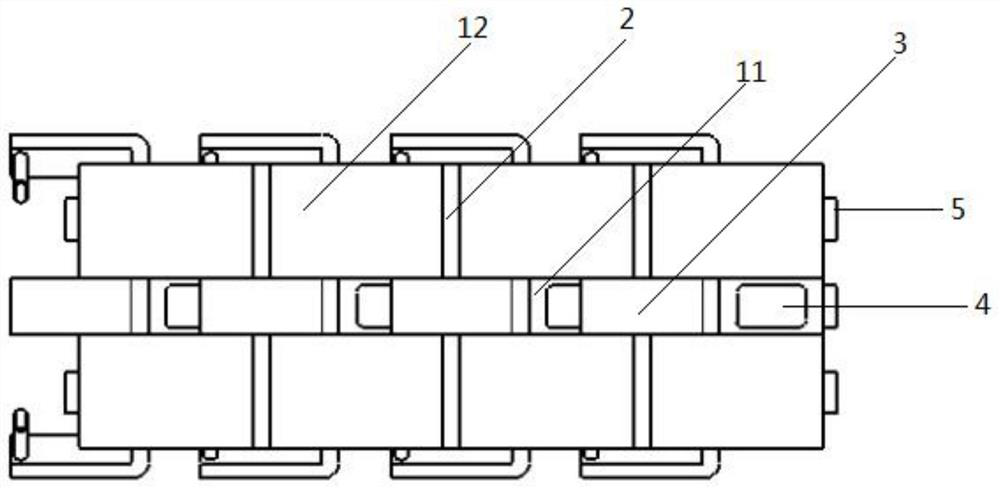
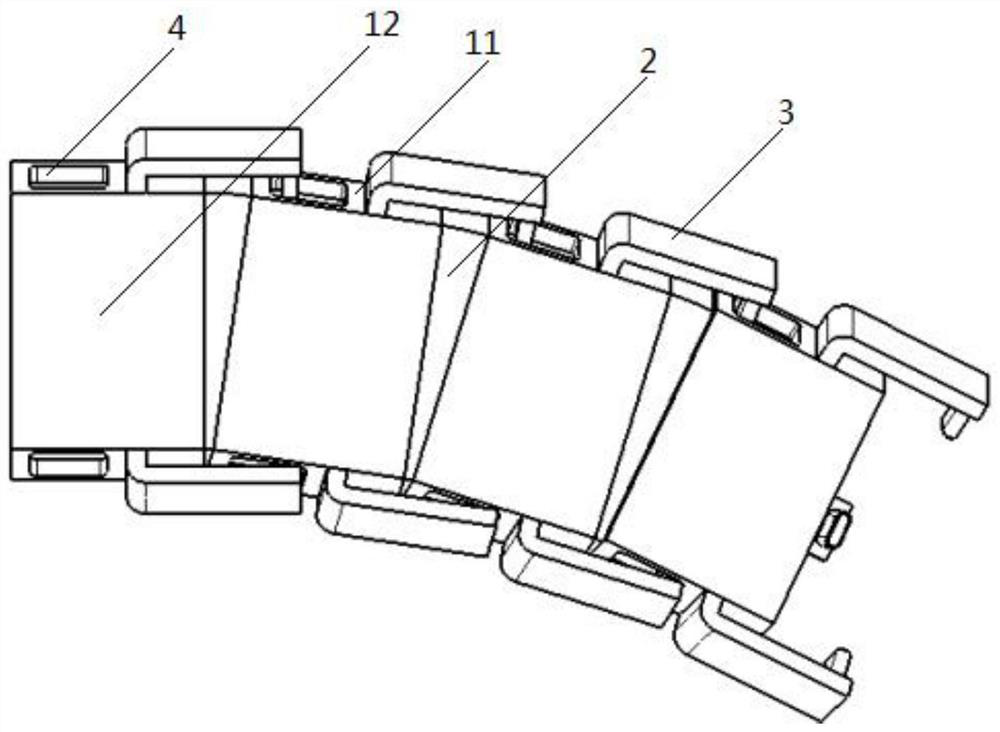
[0031] like Figure 1-7 As shown, the present invention provides a bionic robot spine mechanism, including a plurality of imitation spine rigid bodies 1 and elastic pads 2, the imitation spine rigid body 1 is used to form the skeleton of the whole bionic robot spine mechanism, and the adjacent spine imitation rigid bodies 1 are clamped There is an elastic pad 2, which is fixedly connected to the imitation spine rigid body 1, and the elastic pad 2 can be squeezed or stretched by the adjacent imitation spine rigid body 1. objects, so as to achieve close adhesion with the imitation spine rigid body 1 on both sides, and also make the relative movement between adjacent imitation spine rigid bodies 1 more flexible, which can realize bending deformation in multiple directions and store energy as elasticity during the deformation process. Potential energy can also effectively slow down the impact force between adjacent imitation spine rigid bodies 1 at the same time, improve the stabi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More