

Unmanned aerial vehicle hanging load control method utilizing tether rotor coordination
A multi-rotor UAV, quad-rotor UAV technology, applied in attitude control, non-electric variable control, control/adjustment system and other directions, can solve the problem of not taking into account the position and attitude of the multi-rotor UAV hanging system Errors, 3D models are not considered, etc., to improve efficiency, improve task completion speed, and reduce tether retraction time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
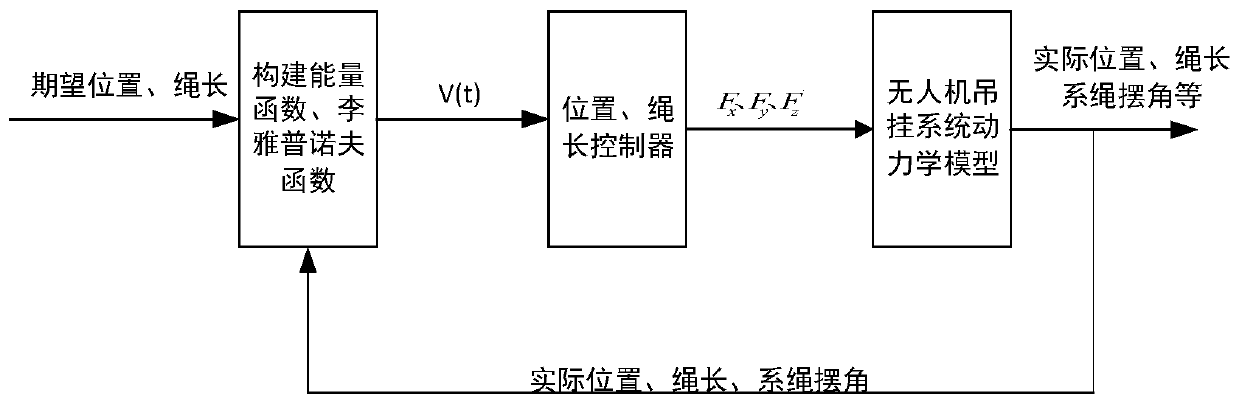
[0039] see figure 1 — figure 2 , the technical scheme adopted in the present invention comprises the following steps:
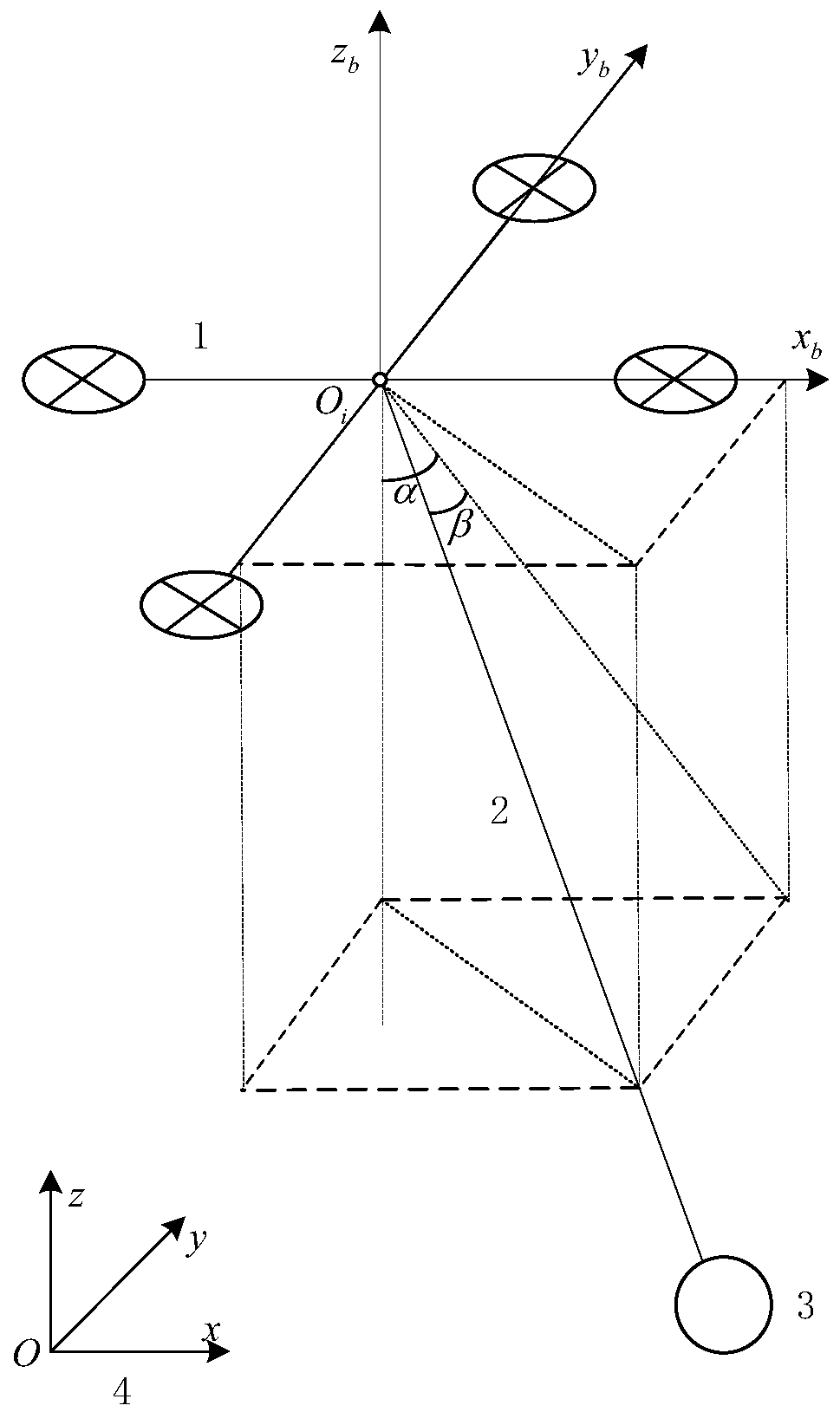
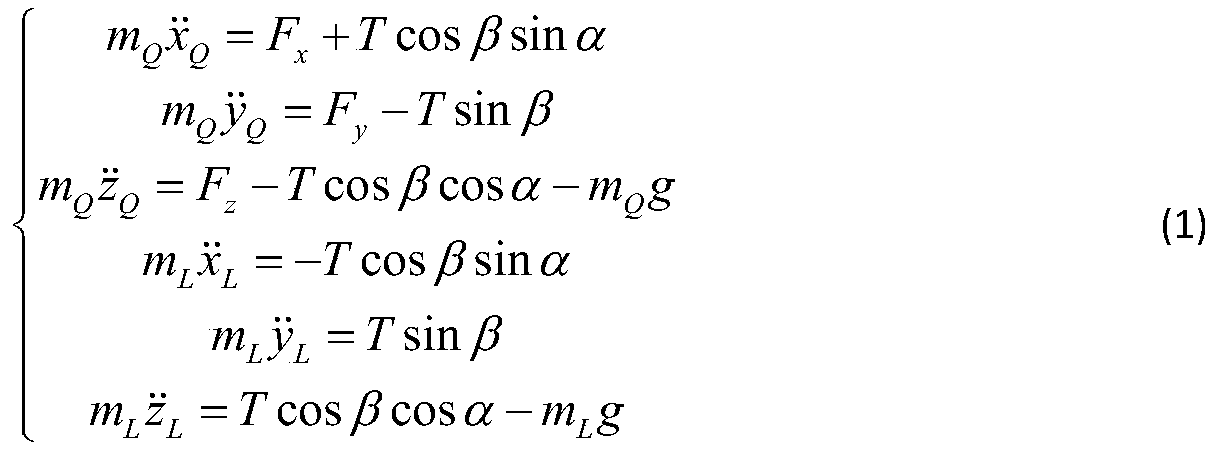
[0040] Step 1: Establish a three-dimensional dynamic model of the multi-rotor UAV suspension system with tether retractable motion
[0041] Assumptions: 1. Since the tether is always in a tight state during the movement, the elasticity, flexibility and quality of the tether are ignored;
[0042] 2. Ignore the posture of the suspended load, and regard the suspended load as a mass point;
[0043] 3. Since the attitude of the UAV is individually controllable, the attitude control of the UAV is ignored;
[0044] 4. The connection point between the tether and the multi-rotor UAV coincides with the center of mass of the UAV.
[0045] The process of UAV hanging flight movement is attached figure 1 As shown, 1 is the multi-rotor UAV, 2 is the tether, 3 is the hanging load, and 4 is the inertial coordinate system. Oxyz is the inertial coordinate system, O 1 x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More