

Magnetic feedback operation instrument for gynecological and obstetric surgical robot
A surgical robot, obstetrics and gynecology technology, applied in the field of surgical robots, can solve problems such as difficult to feel the end of surgical tools, difficult to adjust surgical operations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
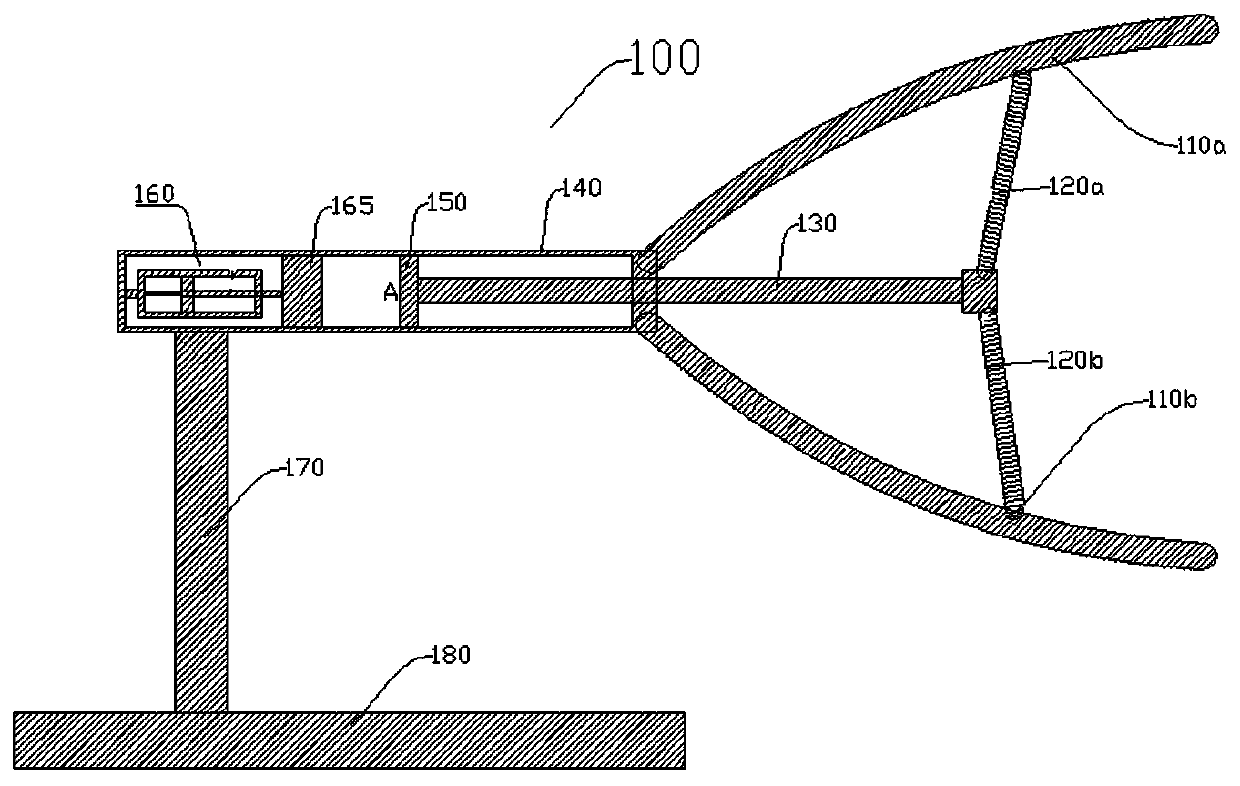
[0021] Embodiment 1: This embodiment discloses a magnetic force feedback operation instrument for obstetrics and gynecology surgery robots, such as figure 1 with image 3 As shown, it includes a control unit 100, a drive unit 300 and an operation unit 200. The control unit 100 remotely controls the drive unit and the operation unit 200. The drive unit 300 installs the operation unit 200 on the end of the surgical robot. The surgical robot is used in the operating room. The doctor operates the control unit 100 at a remote place to control the instruments to perform surgical operations.
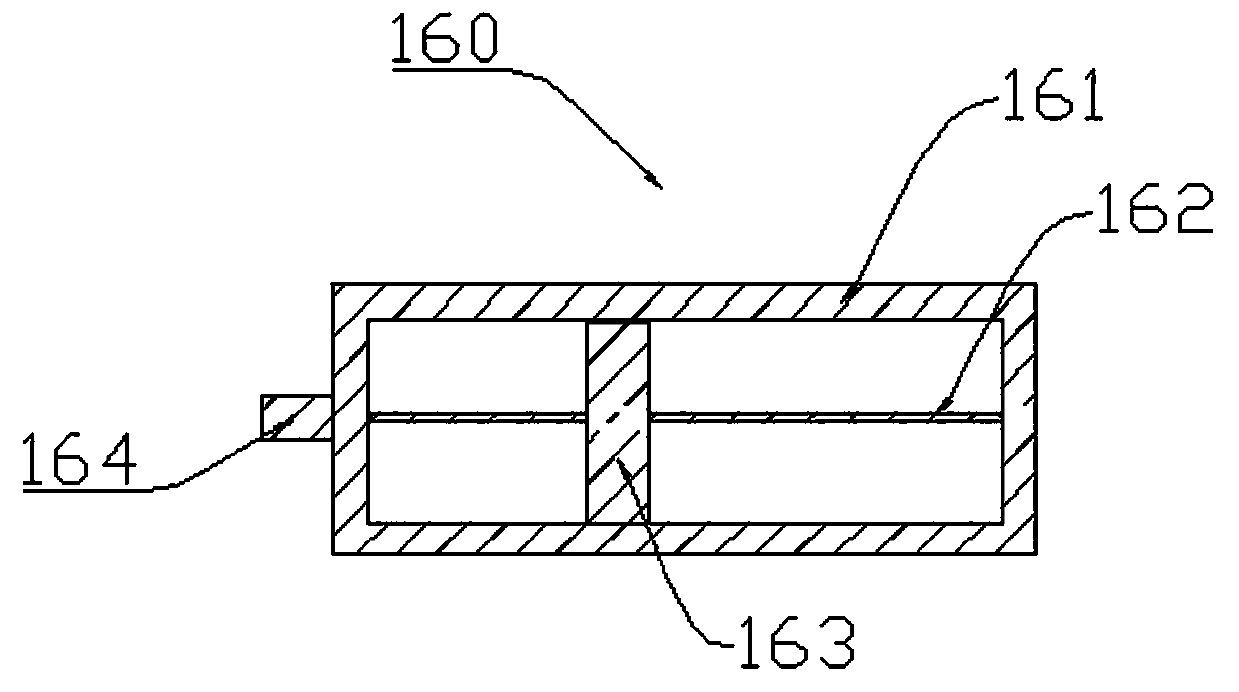
[0022] Specifically, such as figure 1 As shown, the control unit 100 includes a first operating rod 110a, a second operating rod 110b, a first movable rod 120a, a second movable rod 120b, a driving rod 130, an outer sleeve 140, a first magnet 150, and a magnetic field control unit 160, the first operating rod and the second operating rod are hinged on the outer sleeve, the first operating rod...
Embodiment 2
[0028] Embodiment 2: the present invention also discloses a method for operating the above-mentioned obstetrics and gynecology surgical robot magnetic feedback operating apparatus, the steps are as follows:
[0029] Step 1: Obtain the video data of the surgical site in the human body;
[0030] Step 2: Transmit the above data to the surgical robot control system and display it to the operator;
[0031] Step 3: The operator drives the driving rod to move according to the acquired video data, and the moving data of the driving rod is acquired by the sensor and transmitted to the surgical robot control system;
[0032] Step 4: The surgical robot control system controls the movement of the power rod according to the acquired movement data of the driving rod, and then controls the opening and closing of the jaws;
[0033] Step 5: The sensor obtains the magnetic field strength at the third magnet (260), and transmits the magnetic field strength to the magnetic field control unit 160...
Embodiment 3
[0036] Embodiment 3: The present invention also discloses an obstetrics and gynecology surgical robot, which adopts the control method described in Embodiment 2. The obstetrics and gynecology surgical robot includes the magnetic force feedback operating instrument of the obstetrics and gynecology surgical robot in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More