

Intelligent vehicle prediction control method based on visual spatial-temporal characteristics
A spatiotemporal feature, predictive control technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control and other directions, can solve problems such as lack of rationality, and achieve the effect of improving the accuracy of predictive control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
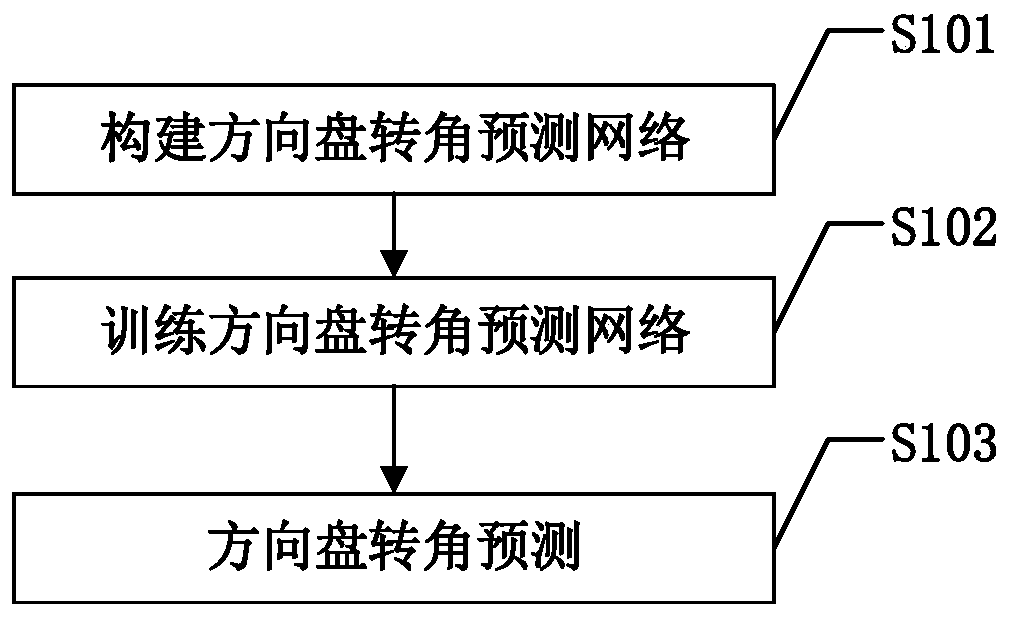
[0029] figure 1 It is a specific implementation structure diagram of the intelligent vehicle predictive control method based on visual spatiotemporal features of the present invention. like figure 1 As shown, the specific steps of the intelligent vehicle predictive control method based on visual spatiotemporal features of the present invention include:
[0030] S101: Build a steering wheel angle prediction network:
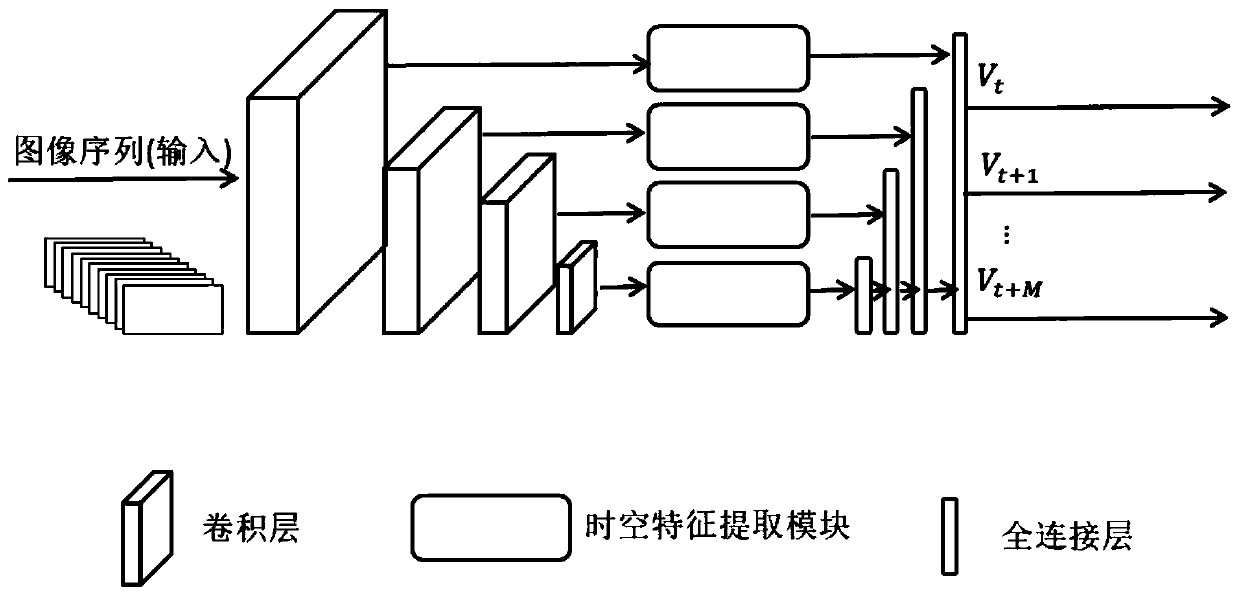
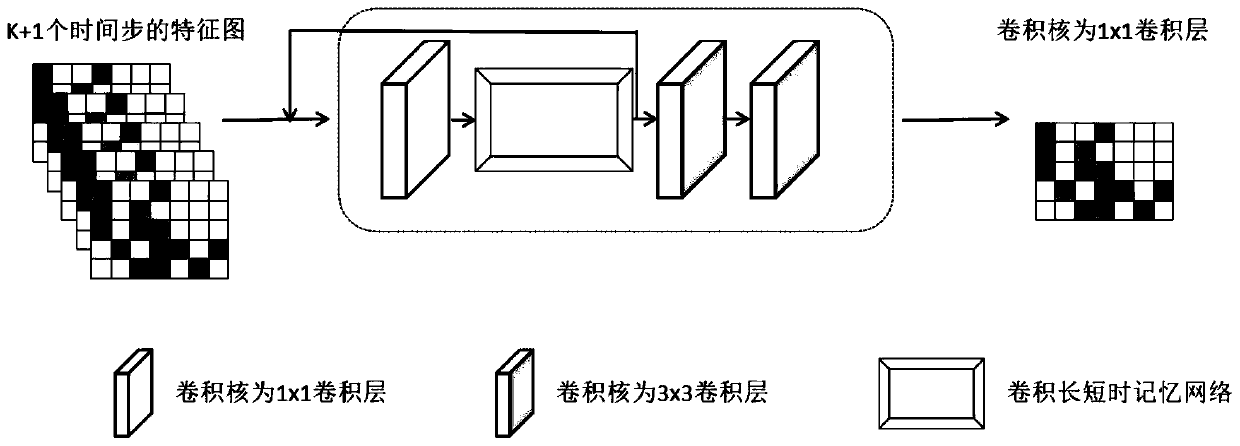
[0031] Build a steering wheel angle prediction network. figure 2 It is the structure diagram of the steering wheel angle prediction network in the present invention. like figure 2As shown, the present invention includes a spatial feature extraction network, N spatiotemporal feature extraction modules, and a temporal feature map fusion prediction module. Each module will be described in detail below.
[0032] The input of the spatial feature extraction network is the front road image detected by the smart car, and the front road image detected by the smart c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More