

ORB robot image registration method
An image registration and robotics technology, applied in the image field, can solve the problems of no scale invariance, the influence of image registration accuracy, and low computational complexity, so as to solve the problem of scale invariance, improve the accuracy of image registration, The effect of guaranteeing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
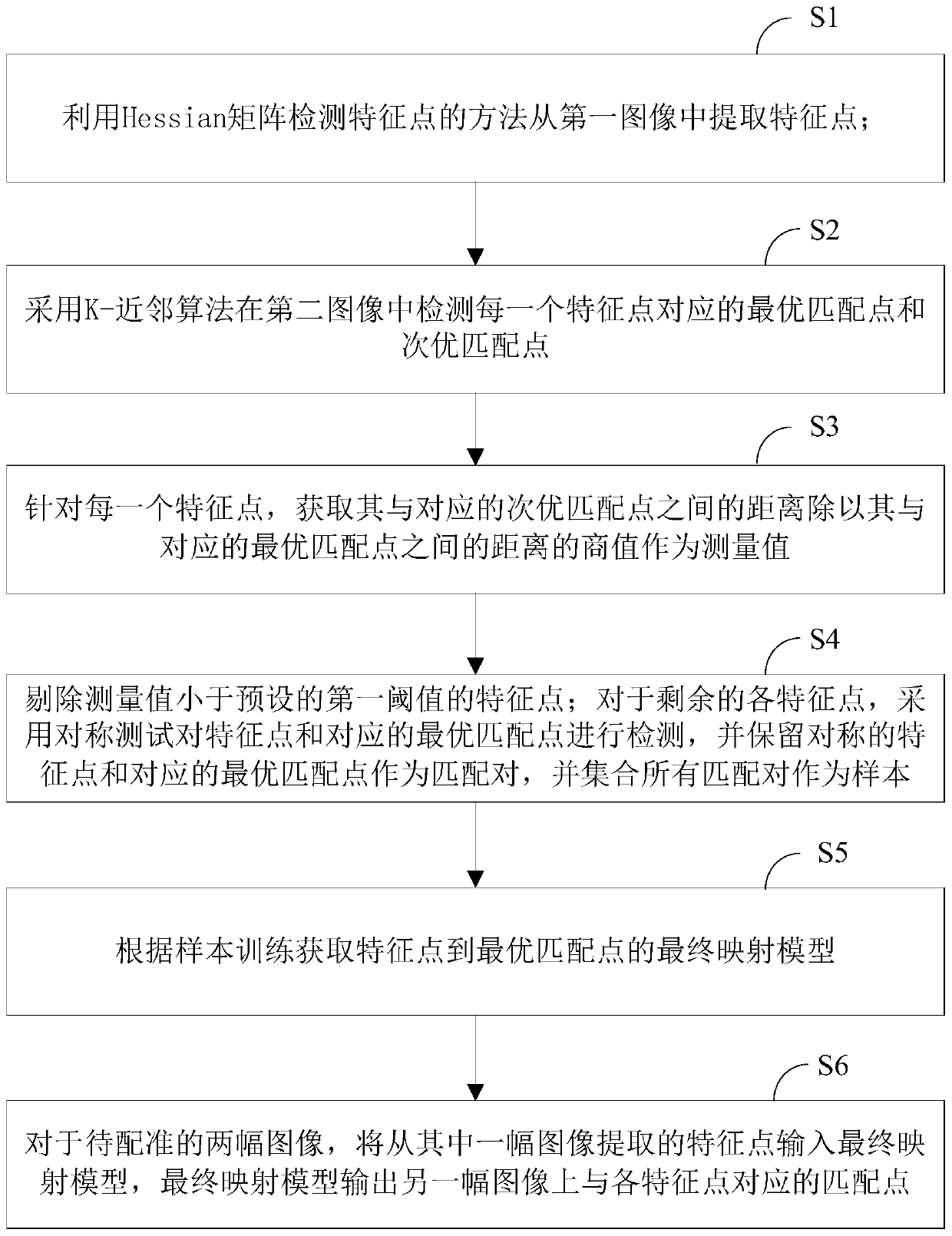
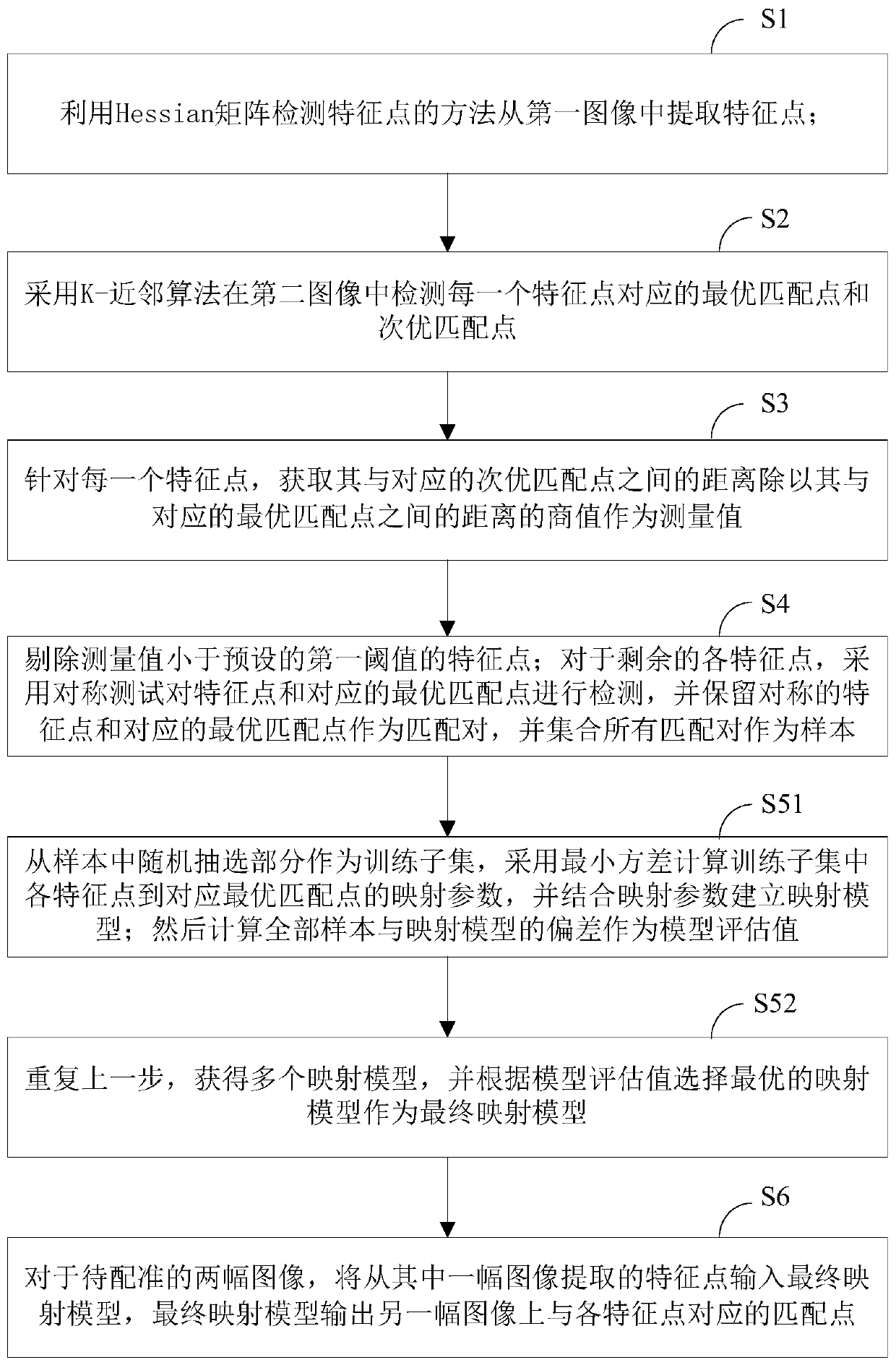
[0028] refer to figure 1 , a kind of ORB robot image registration method that the present invention proposes, comprises the following steps.
[0029] S1. Extracting feature points from the first image by using a Hessian matrix to detect feature points.
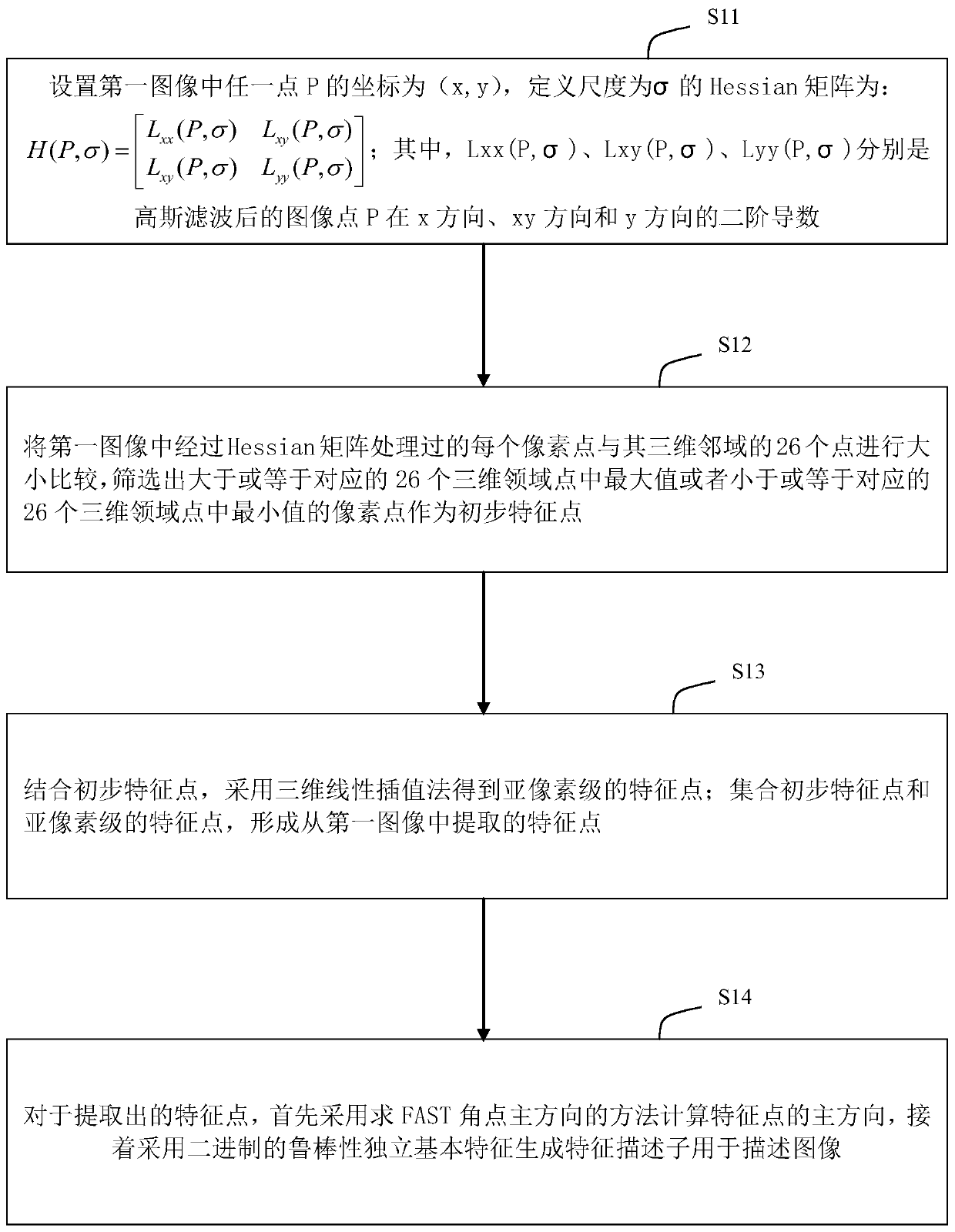
[0030] refer to figure 2 , in this step, the extraction of feature points is as follows:
[0031] S11. Set the coordinates of any point P in the first image as (x, y), and define the Hessian matrix whose scale is σ as: Among them, Lxx(P, σ), Lxy(P, σ), and Lyy(P, σ) are the second derivatives of the Gaussian filtered image point P in the x direction, xy direction and y direction, respectively.
[0032] In the specific implementation of this step, since the Gaussian filter is required first to obtain the Hessian, and then the second order derivative is obtained, in the discrete pixel points, a template can be used instead, such as Figure 4 shown. This template can greatly increase calculation speed. Figure 4 The top r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More