

Point cloud data division method and device, obstacle detection method and device
A point cloud data, point cloud technology, applied in the computer field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manners of the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific implementation manners described here are only used to illustrate and explain the embodiments of the present invention, and are not intended to limit the embodiments of the present invention.
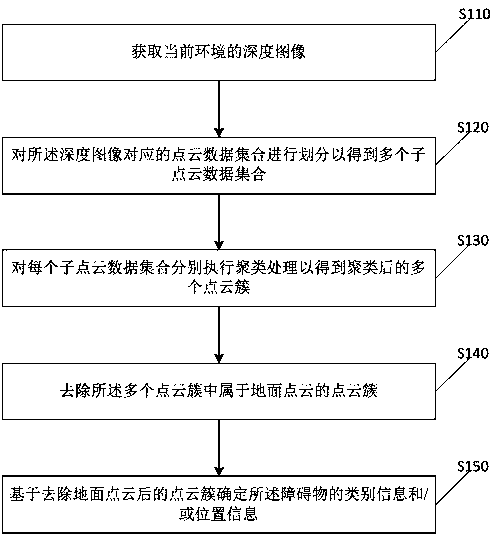
[0030] figure 1 A schematic flowchart of an obstacle detection method according to an embodiment of the present invention is shown. Such as figure 1 As shown, the embodiment of the present invention provides an obstacle detection method, which can be applied to obstacle detection of various types of construction machinery. The method may include: step S110, acquiring a depth image of the current environment; step S120, dividing the point cloud data set corresponding to the depth image to obtain multiple sub-point cloud data sets; step S130, for each sub-point cloud data set The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More