

Grabbing mechanism or railway wrist arm mounting robot
A grasping mechanism and robot technology, applied in the direction of lifting equipment safety device, manipulator, lifting device, etc., can solve the problem of inability to achieve precise adjustment, and achieve the effects of high installation and movement efficiency, improved installation efficiency, and high convenience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
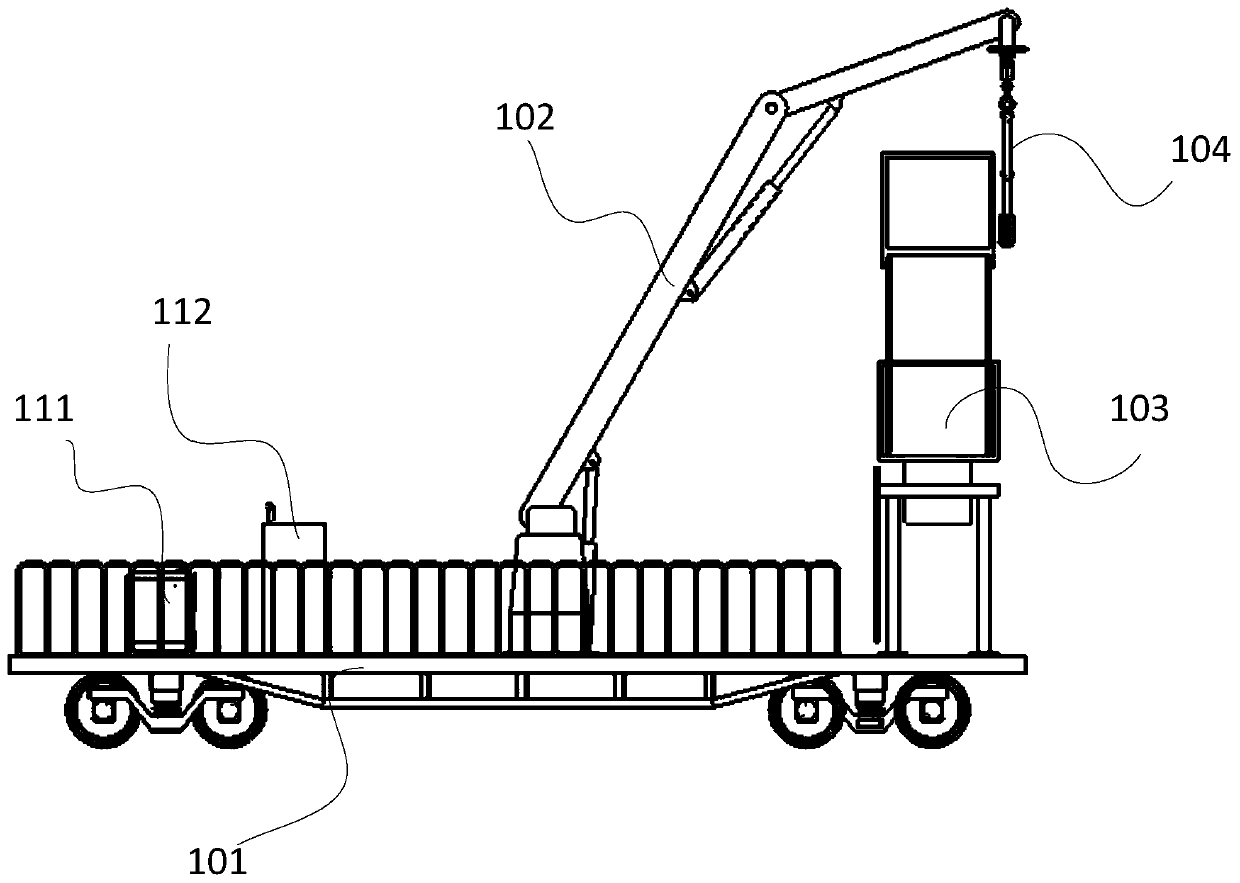
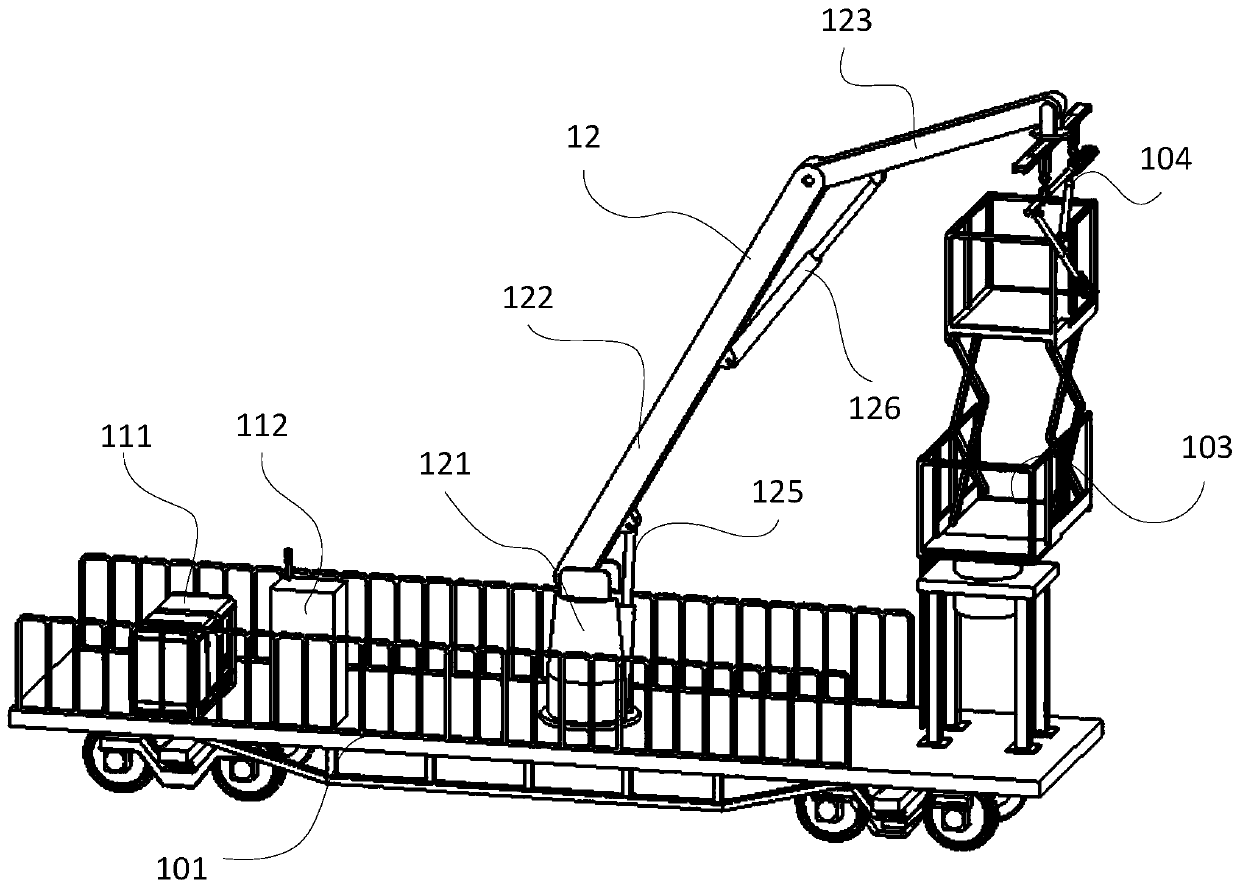
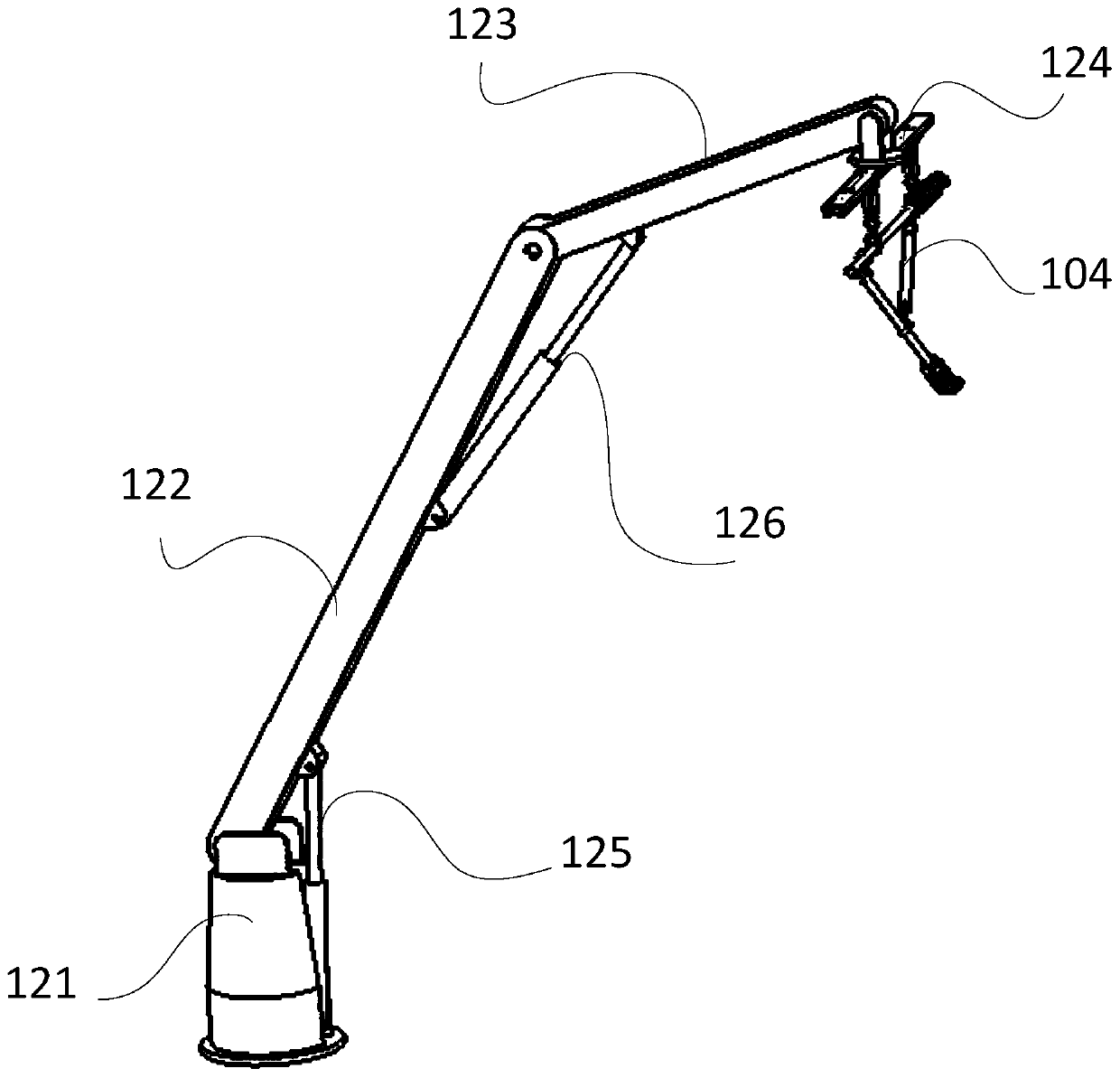
[0035] Such as Figure 1 to Figure 9 As shown, this embodiment provides a railway arm arm installation robot, which travels along the track direction and lifts the arm arm 104 to the installation position of the catenary pillar. It should be noted that the serial numbers such as "first" and "second" in this embodiment are only used to distinguish similar components, and should not be understood as specific limitations on the scope of protection. In addition, directional terms such as "bottom", "top", "surrounding edge", and "center" in this embodiment are described based on the drawings. In addition, the structure of the track vehicle in this embodiment is similar to that of the track inspection vehicle, so its internal structure will not be described in detail here; not only that, the control box in this embodiment is purchased, and it is obtained by wiring conventional controllers and electrical components. , and the control program can be realized by a combination of conve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More