

An autonomous navigation method for ring-fire orbit based on spherical unscented transformation
A technology of traceless transformation and autonomous navigation, which is applied in navigation, integrated navigator, surveying and navigation, etc. It can solve the problems of being unable to meet the requirements of Mars rover ring fire detection, narrow measurable window, and long distance between the device and the ground. Achieve the effect of saving ground measurement and control resources, improving on-orbit safety, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] The present invention will be further elaborated below in conjunction with embodiment.
[0051] When determining the autonomous orbit of the probe, calculate the position of the probe in the inertial system of Mars according to the attitude quaternion output by the star sensor and the orbit information output by the navigation sensor, and use the basic principle of spherical unscented transformation to construct a filtering algorithm to estimate the probe in real time position, velocity. Compared with the existing technology, the beneficial effect is: an autonomous navigation method for the ring-fire orbit based on spherical traceless transformation, which enables the probe to use the full field model of the Mars probe during the autonomous navigation process, and improves the orbit autonomy. Definite precision.
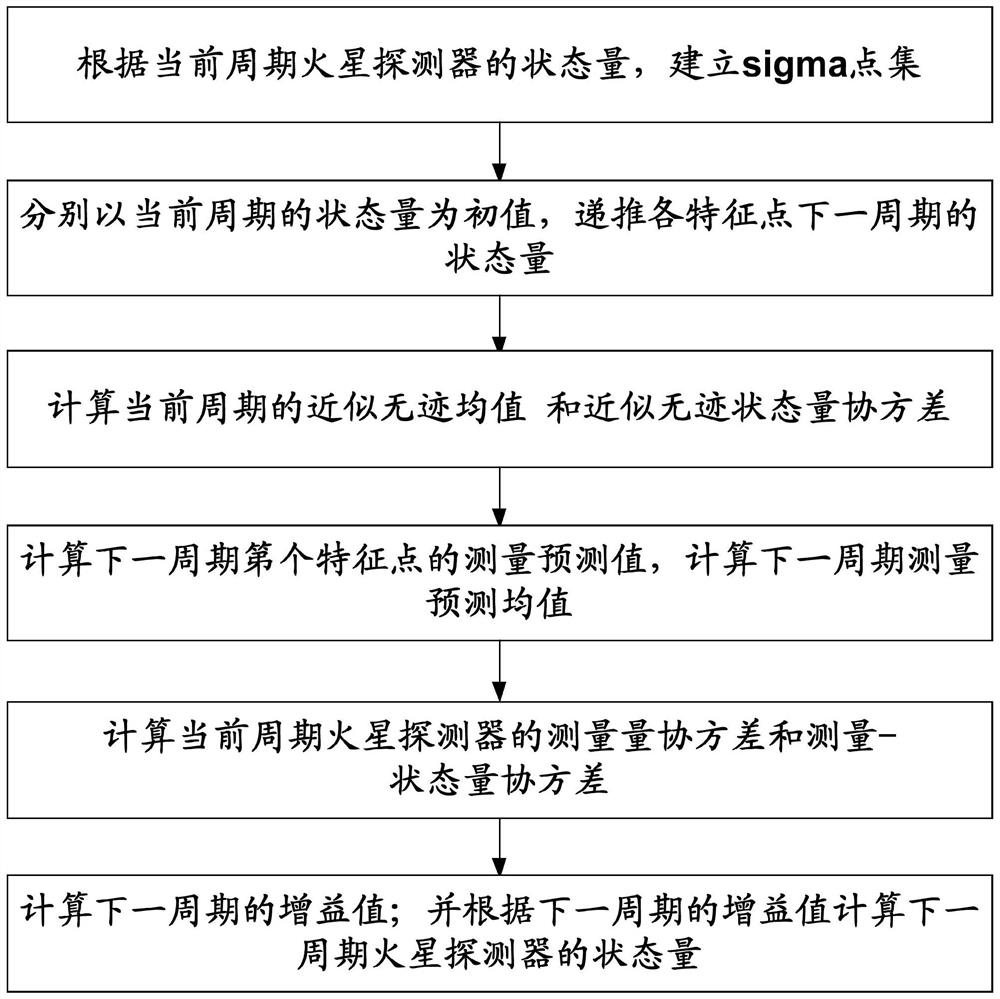
[0052] like figure 1 As shown, the autonomous navigation method of the orbit around the fire mainly includes the following steps:
[0053] Step 1. Measure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More