

Multi-rotor unmanned aerial vehicle control method and device, multi-rotor unmanned aerial vehicle and storage medium
A technology of multi-rotor drones and control methods, applied in the fields of multi-rotor drone control, multi-rotor drones and storage media, can solve problems such as large wind resistance and affecting the flight control effect of multi-rotor drones, and achieve Improve the effect of flight control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Specific embodiments of the present disclosure will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present disclosure, and are not intended to limit the present disclosure.
[0054] It should be noted that the terms "first" and "second" in the specification and claims of the present disclosure and the above drawings are used to distinguish similar objects, and should not be interpreted as describing a specific sequence or sequence.
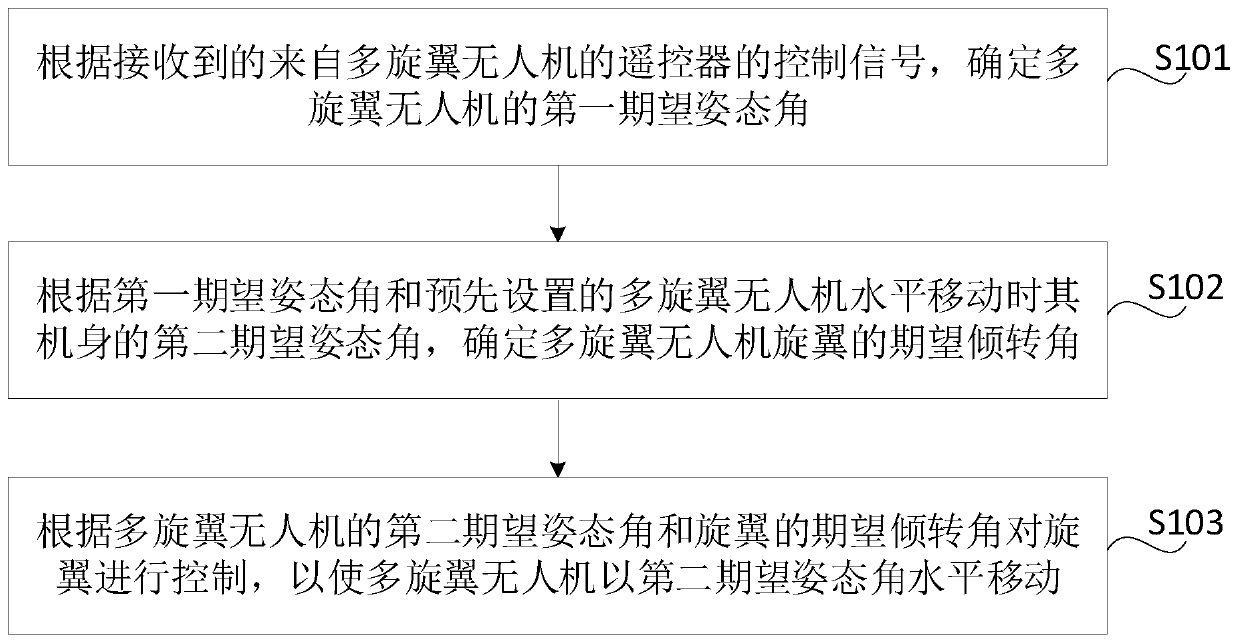
[0055] figure 1 It is a flow chart of a method for controlling a multi-rotor drone according to an exemplary embodiment of the present disclosure. The method is applied to a multi-rotor drone and can be implemented by a built-in controller in the multi-rotor drone. Such as figure 1 As shown, the method includes the following steps:
[0056] S101. Determine a first desired attitude angle of the mult...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More