Optimal driving path planning method and system based on improved A* algorithm
A technology of driving path and algorithm, which is applied in the direction of radio wave measurement system, satellite radio beacon positioning system, road network navigator, etc., which can solve the problem of low positioning accuracy, inability to bring better navigation services to users, and low technical content, etc. problem, to achieve the effect of improving the utilization rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] Embodiment 1, this embodiment provides an optimal driving path planning method based on the improved A* algorithm;
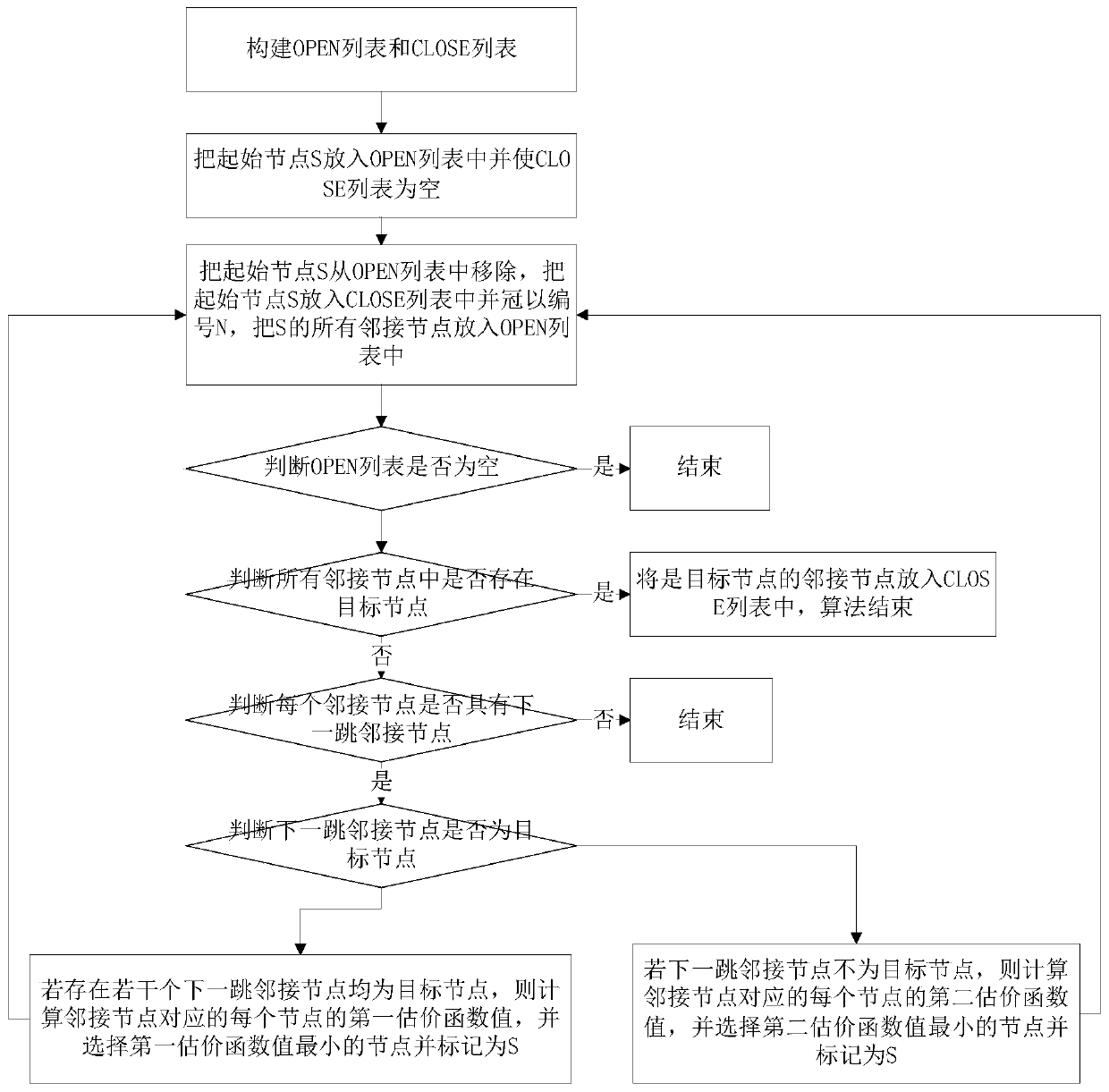
[0030] An optimal driving path planning method based on the improved A* algorithm, the algorithm flow is as follows figure 1 shown, including:
[0031] Obtain the start node and target node of the path to be planned;
[0032] Based on the starting node and target node of the path to be planned, the improved A* algorithm is used to obtain the optimal driving route; the improved A* algorithm is to improve the evaluation function of the A* algorithm; the improved evaluation function is: The product of the evaluation function of the traditional A* algorithm and the direction parameter.
[0033] As one or more embodiments, the initial node and the target node of the path to be planned are based on the improved A* algorithm to obtain the optimal driving path; the specific steps include:
[0034] S200: construct an OPEN list and a CLOSE list;
[0035] S201: ...
Embodiment 2
[0086] Embodiment 2, this embodiment provides an optimal driving route planning system based on the improved A* algorithm;
[0087] An optimal driving path planning system based on the improved A* algorithm, including:
[0088] An acquisition module configured to: acquire the starting node and the target node of the path to be planned;
[0089] The path planning module is configured to: use the improved A* algorithm to obtain the optimal driving path based on the starting node and the target node of the path to be planned; the improved A* algorithm is to perform an evaluation function on the A* algorithm Improvement; the improved evaluation function is: the product of the evaluation function of the traditional A* algorithm and the direction parameter.
Embodiment 3
[0090] Embodiment 3. This embodiment also provides an electronic device, including a memory, a processor, and computer instructions stored in the memory and run on the processor. When the computer instructions are executed by the processor, the computer instructions in Embodiment 1 are completed. described method.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More