Humanoid robot foot grounding detection method
A humanoid robot and detection method technology, applied in the direction of instruments, measuring devices, computer components, etc., can solve the problems of high price, easy damage, and affecting practicality, etc., and achieve scalability, strong program operation ability, and avoid The effect of mechanical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
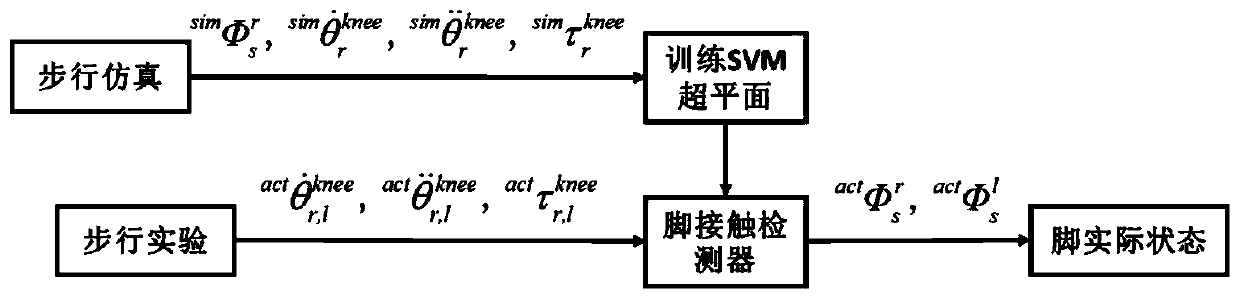
[0031] Such as figure 1 , a kind of humanoid robot foot contact detection method proposed by the present invention, comprises the following steps:
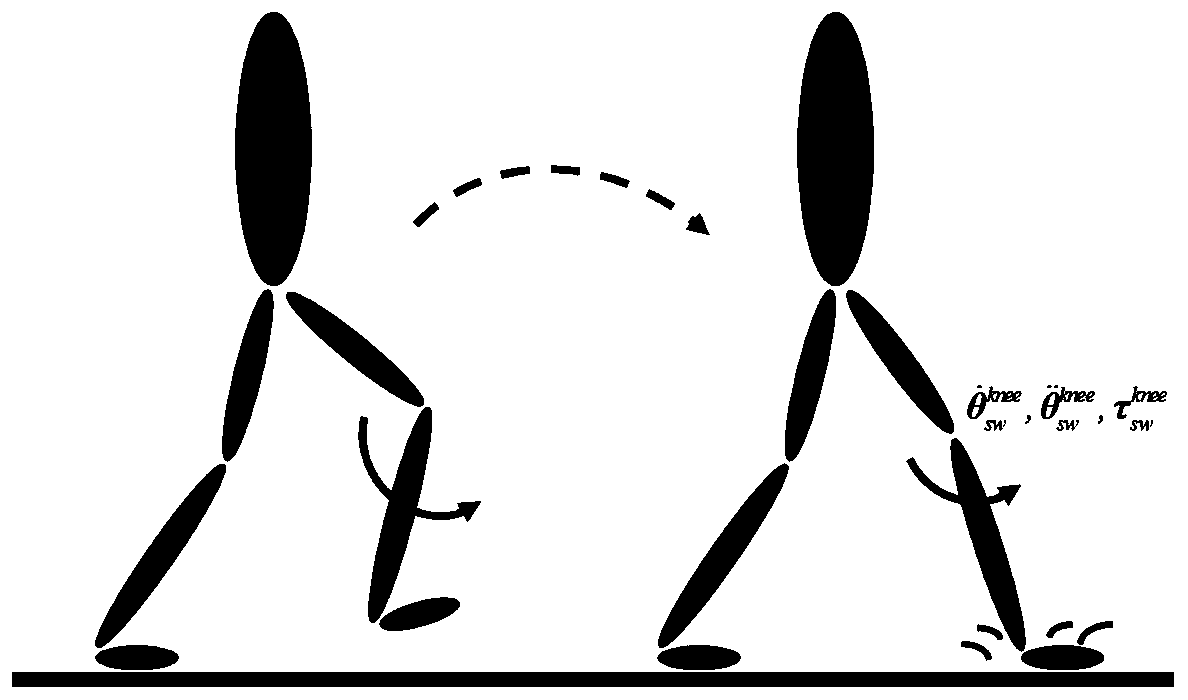
[0032] Step 1. The walking of the humanoid robot is highly similar to the walking of human beings. In the cyclically symmetrical gait, when the foot collides with the ground, the hip joint sometimes swings forward and sometimes backward, but the knee joint is in the downward swing process; figure 2 When contact separation occurs, the knee joint always tends to lift (i.e., swing back), so there is a close relationship between the foot contact state and the knee joint movement, so the angular velocity of the knee joint is selected angular acceleration and joint drive torque As the motion state point of the robot at a cer...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap