

Robot control device and control method
A control device and robot technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as the inability of robots to be stable, and achieve the effect of suppressing vibration and achieving smooth motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
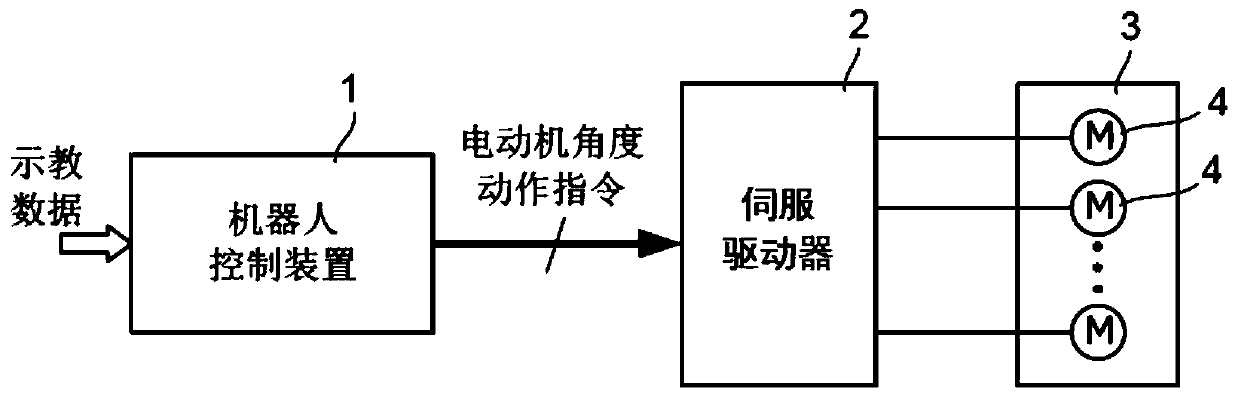
[0028] Next, preferred embodiments of the present invention will be described with reference to the drawings. figure 1 An example of the configuration of a robot system including a robot control device according to the present invention is shown. The robot system consists of a robot 3 having a plurality of axes and each axis has a motor 4 for driving the axis, a robot control device 1 for controlling the motion of the robot 3 based on teaching data, and a robot control device 1 based on motor angle motion commands output from the robot control device 1 . And the servo driver 2 which drives the motor 4 of each axis|shaft of the robot 3 by servo control is comprised. When the teaching data is given from the outside, the robot control device 1 generates a trajectory of the robot so that the tool or the tip of the hand of the robot 3 moves to the coordinates specified by the teaching data, and generates each trajectory for driving the robot 3. The motor angle action command of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More