

Method and apparatus of non-contact tool center point calibration for a mechanical arm, and a mechanical arm system with said calibration function
A technology of tool center point and mechanical arm, applied in the direction of manipulator, program-controlled manipulator, manufacturing tool, etc., can solve the problems of high human influence factors, large error, and reduced utilization rate of equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The detailed features and advantages of the present invention are described in detail below in the embodiments, which are sufficient to enable those skilled in the art to understand the technical content of the present invention and implement it accordingly, and according to the contents disclosed in this specification, claims and drawings, any The related objects and advantages of the present invention can be easily understood by those skilled in the art. The following examples further illustrate the concept of the present invention in detail, but do not limit the scope of the present invention in any way.
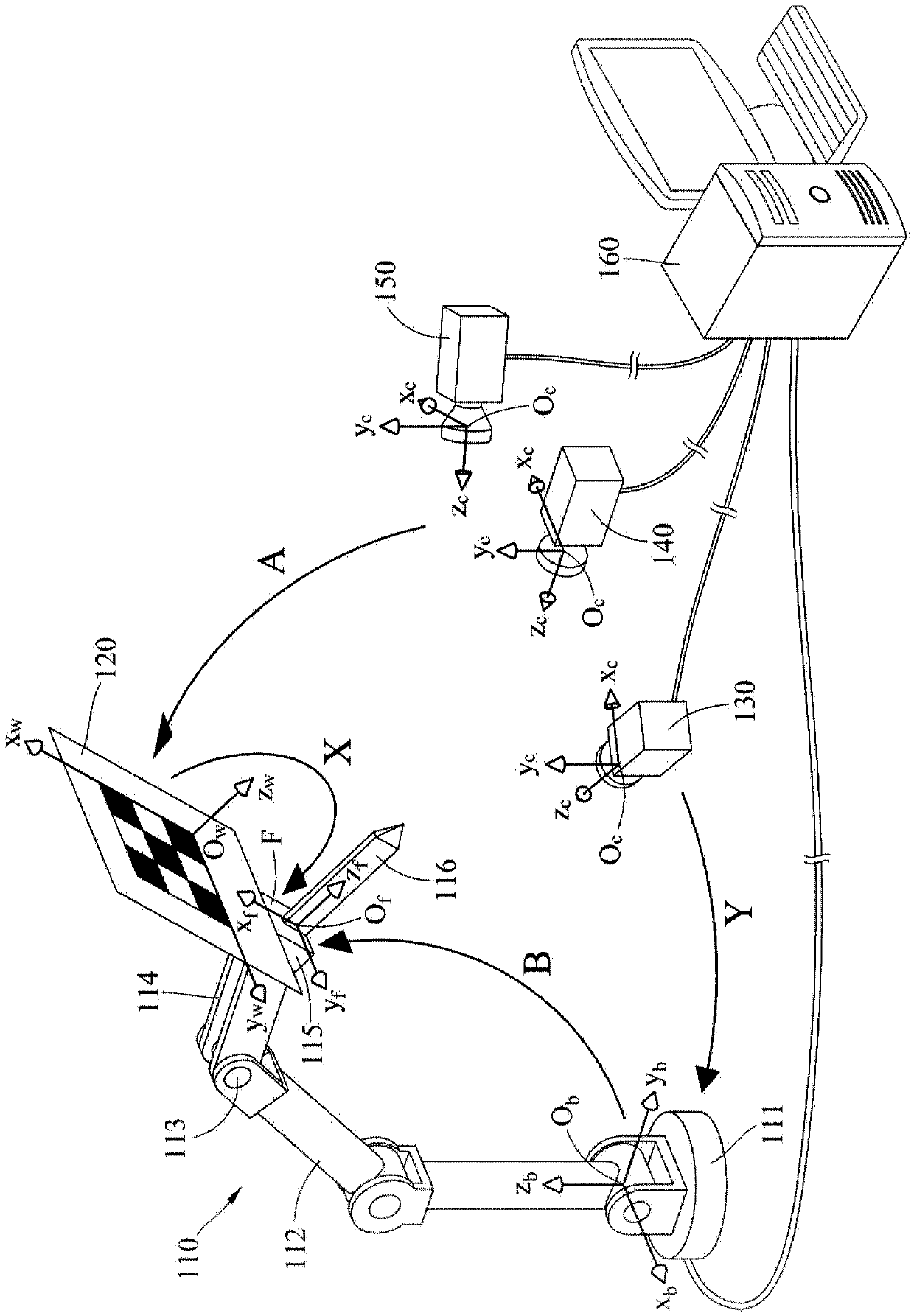
[0038] see figure 1 , which shows a robotic arm 110 for performing the non-contact tool center point (ToolCenter Point, TCP) calibration method of the robotic arm of the present invention. The non-contact tool center point calibration method of the robotic arm of the present invention is not limited to implementation in A mechanical arm with this structure. The r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More