

Method, device and electronic equipment for determining distance between interaction target and robot
A robot and target technology, applied in the field of artificial intelligence, can solve problems such as high complexity and unsuitable scenarios requiring real-time requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
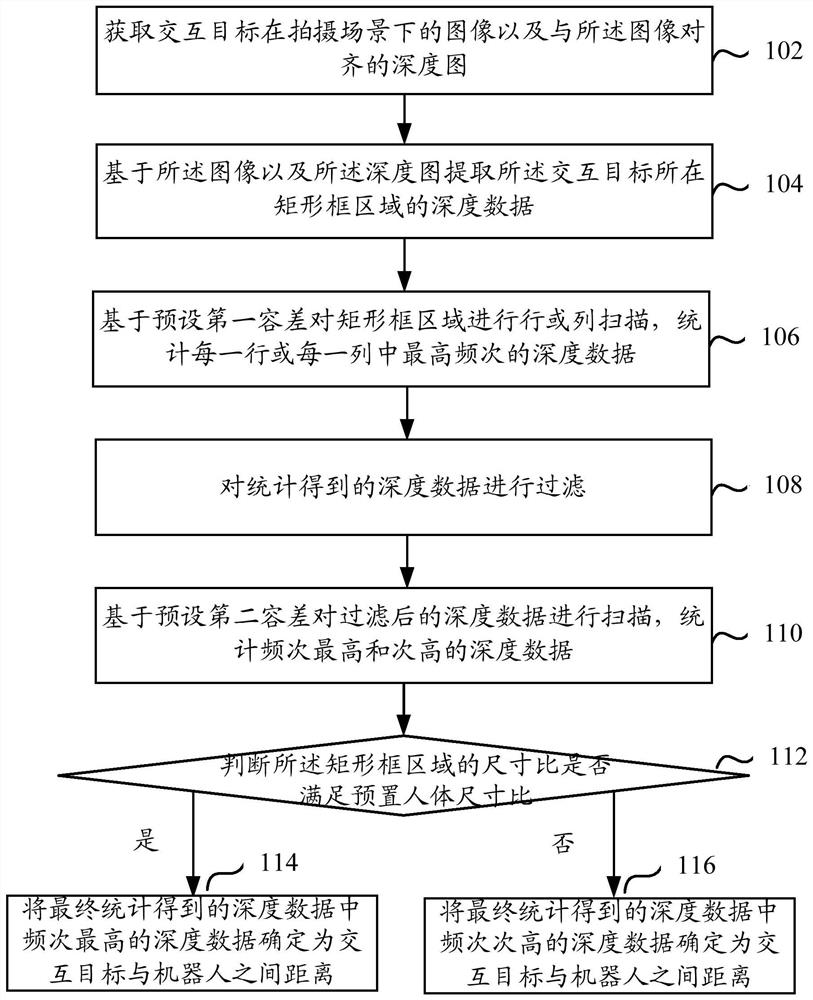
[0039]Referfigure 1 As shown, a method step of determining the distance between the interaction target and the robot is provided for the present specification embodiment, the method comprising the steps of:
[0040]Step 102: Get an image of an interactive target in the shooting scene and a depth map aligned with the image.
[0041]Among them, the interaction target can be a person with a message interacting with a robot (hereinafter referred to as the robot), the interactive robot has a similar shape structure, for example, with head, limbs, torso, etc.
[0042]It should be understood that a processor for collecting images and a processor for processing an image is integrated on the detection robot. In particular, the interactive target can be acquired by the camera in real time, and the RGB image under shooting scene is used, and the depth map of the RGB image is also available. In particular, the existing binocular camera can be utilized to obtain a depth map of the RGB image alignment, in...
Embodiment 2
[0101]Referimage 3 As shown, a structural schematic structural diagram of the device 300 that determines the distance between the interactive target and the robot, the apparatus 300, which may include the following modules:
[0102]The module 302 is acquired to obtain an image of an interactive target in the photographing scene and a depth map aligned with the image;
[0103]The extraction module 304 is used to extract depth data in the rectangular frame region of the interaction target based on the image and the depth map;
[0104]Statistical module 306 for performing row or column scanning, counting the highest frequency in each row or each column based on the preset first tolerance;
[0105]Filter module 308; after the statistical module 306 is statistically corresponding depth data corresponding to the highest frequency in the column, the statistically obtained depth data is filtered;
[0106]The statistical module 306 is further configured to scan the filtered depth data based on the preset s...
Embodiment 3
[0126]BelowFigure 4 The electronic device of the embodiment of this specification is described in detail. Please refer toFigure 4 At the hardware level, the electronic device includes a processor, optionally also include an internal bus, a network interface, a memory. The memory may contain memory, such as high speed random access memory, may also include a non-volatile memory, such as at least 1 disk memory, or the like. Of course, the electronic device may also include the hardware required for other business.
[0127]Processors, network interfaces, and memory can be connected to each other through internal bus, which can be an industrial standard architecture, ISA bus, peripheral component interconnect, PCI boss bus or extended industry standard Extendedustry Standard Architecture, EISA Bull, etc. The bus can be divided into an address bus, a data bus, a control bus, and the like. For ease of expression,Figure 4 In only one bidirectional arrow is used, it does not mean that there is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More