Shelf height adjusting storage shelf based on climbing robot and control method of storage shelf
A robotic and adjustable technology, applied in the field of storage shelves, can solve the problems of low degree of automation and inconvenient operation of height adjustment, and achieve the effects of high degree of automation, stable and reliable climbing action, and simple and stable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
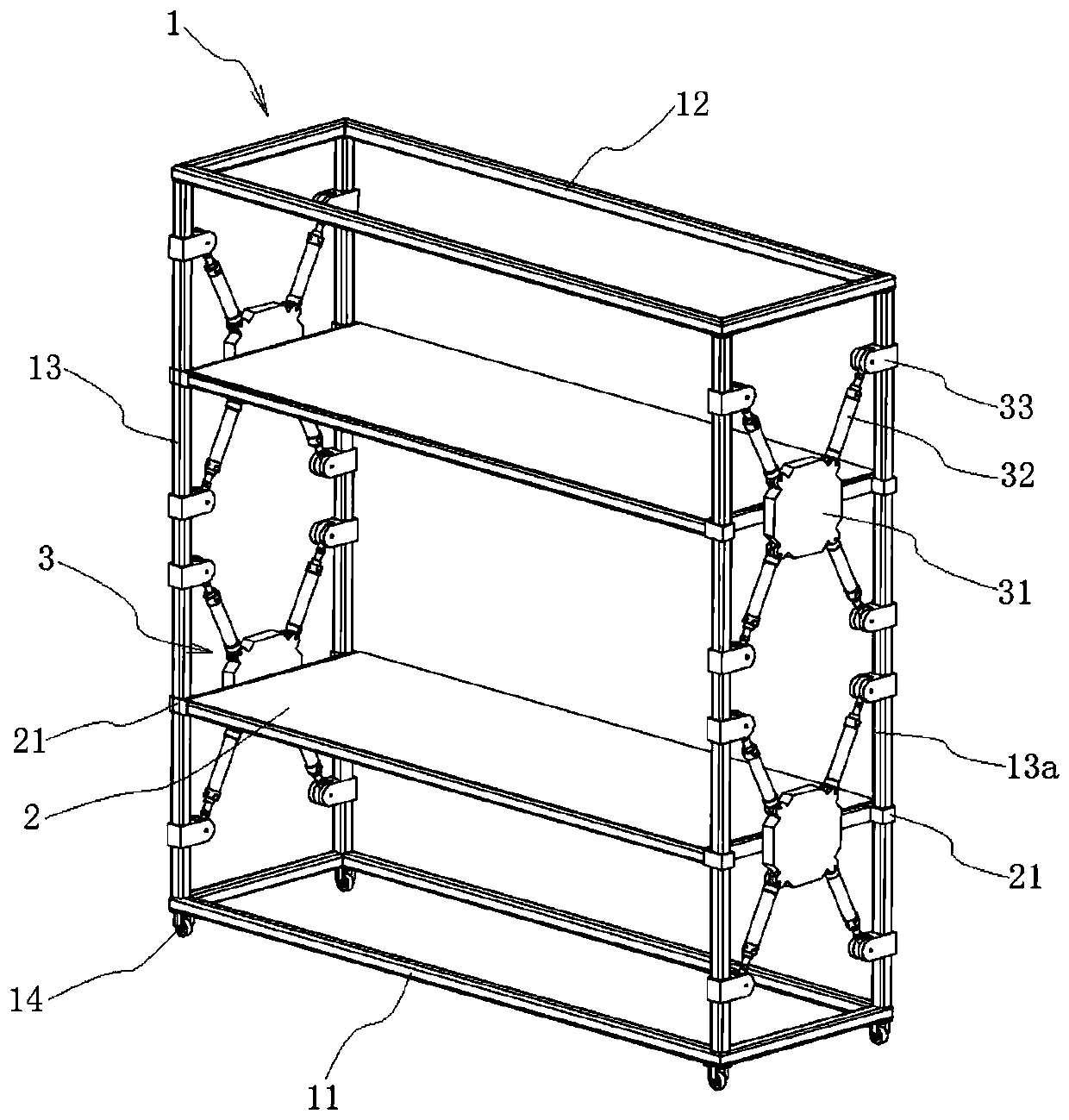
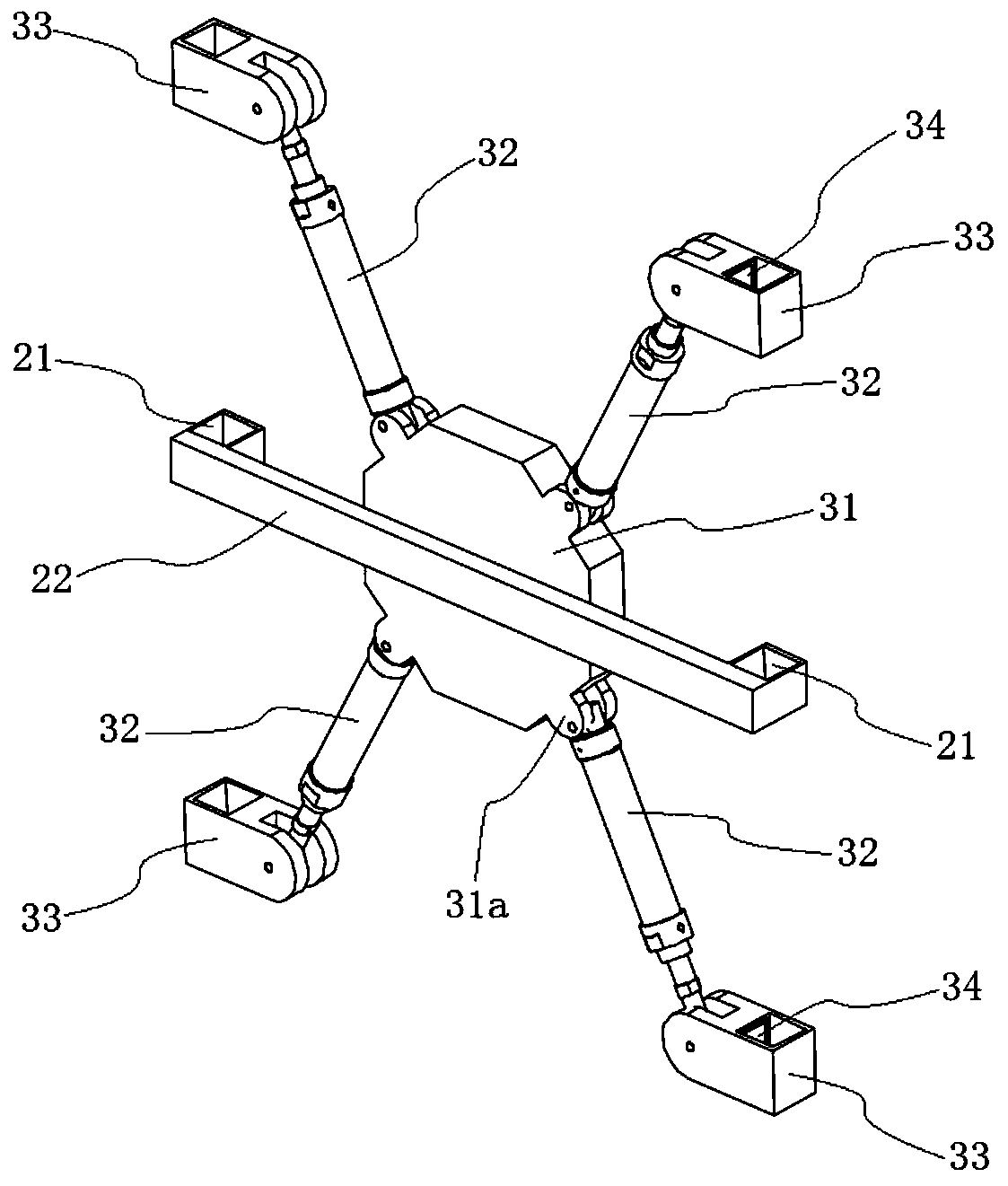
[0038] combine figure 1 and figure 2As shown, a height-adjustable storage shelf based on a climbing robot in this embodiment includes a frame 1 and several shelves 2 installed on the frame 1. The frame 1 is the main part of the shelf, and the shelves 2 are used to separate the frames 1. storage space for storing goods; the frame 1 includes a bottom frame 11, a top frame 12, and four uprights 13 installed between the bottom frame 11 and the top frame 12, the bottom frame 11, the top frame 12 and the uprights 13 form a whole It is a rectangular frame structure, in order to facilitate the overall movement of the shelf, there are also rollers 14 with self-locking function at the bottom of the bottom frame 11 of the frame 1, which facilitates the movement of the shelf position. Different from the existing shelves, it also includes a climbing robot 3, and the two ends of the shelf 2 are respectively installed on two corresponding columns 13 on both sides of the frame 1 through the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More