

Wall climbing mechanism of glass curtain wall cleaning robot and working method thereof
A technology for cleaning robots and glass curtain walls, applied to cleaning machinery, machine parts, motor vehicles, etc., can solve the problems of high air pump requirements, low work efficiency, difficult operation, etc., and achieve good cleaning effect, high cleaning efficiency, flexible and convenient operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
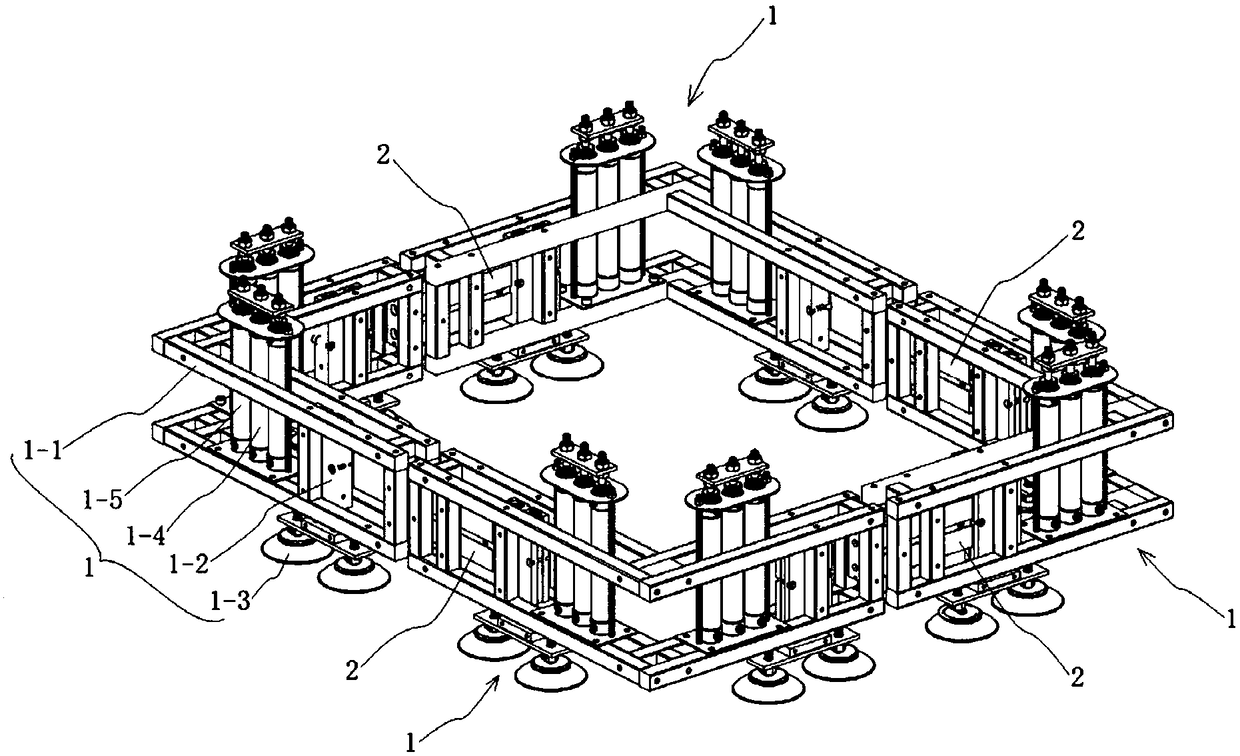
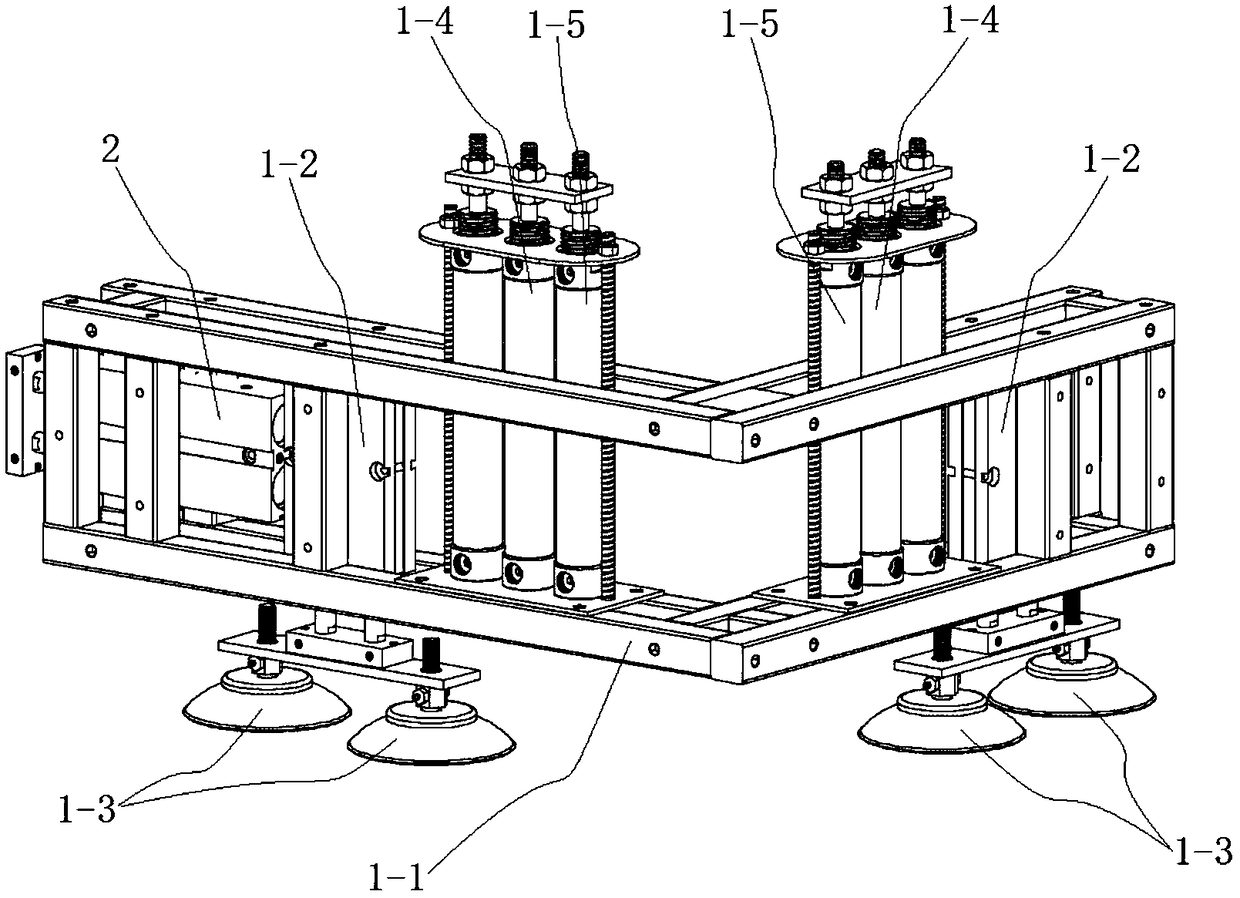
[0036] combine figure 1 and figure 2 As shown, the wall-climbing mechanism of a glass curtain wall cleaning robot in this embodiment includes four sets of walking assemblies 1, and the four sets of walking assemblies 1 are connected end to end by four sets of walking cylinders 2 to form a closed structure, and the opposite two sets of walking assemblies The cylinders 2 move synchronously in the same direction, and the telescopic directions of the adjacent two groups of walking cylinders 2 are perpendicular to each other; in this way, the opposite two groups of walking cylinders 2 can move in one direction when they move synchronously, so as to meet the requirements of the glass curtain wall cleaning robot. For horizontal and vertical movement needs, the design is simpler and more compact, and the wall-climbing action is more stable and easy to control. Without servo motor drive, the wall-climbing action is more sensitive and has higher work efficiency. The walking assembly 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More