

UGV driving path planning method based on UAV cooperation sensing
A driving path and collaborative perception technology, applied in two-dimensional position/course control, vehicle position/route/altitude control, instruments and other directions, can solve the uncertainty and uncontrollability of motion trajectory, and it is difficult to effectively complete collision risk prediction and control. Evaluation, automatic collision avoidance, real-time and efficient driving path planning, inability to adapt to dynamic environmental changes, etc., to achieve the effect of automatic planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0041] The invention provides a UGV driving path planning method based on UAV cooperative perception, specifically implemented according to the following steps:
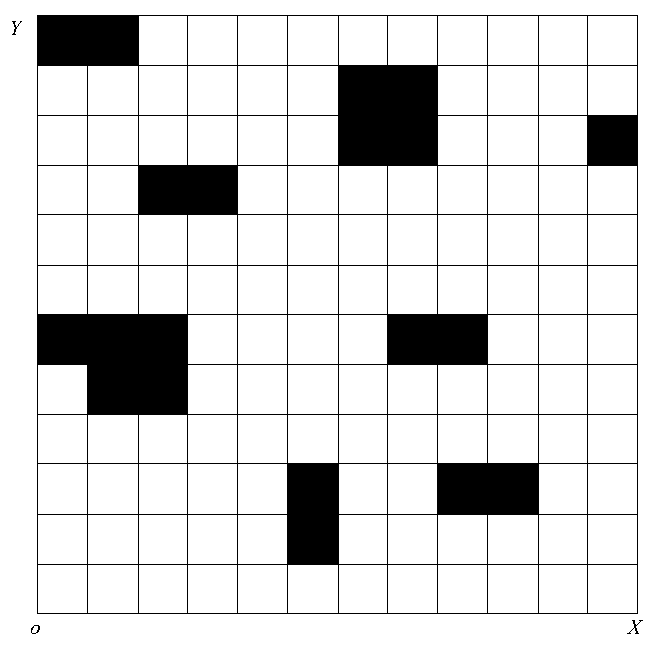
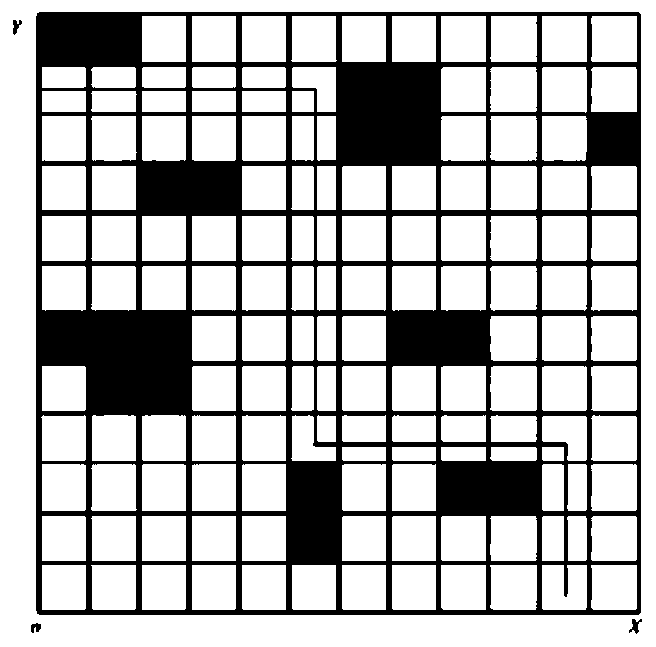
[0042] Step 1, environmental modeling and environmental perception: establish a real-time information interaction environment, obtain scene information, and convert the obtained scene information into a raster scene map;
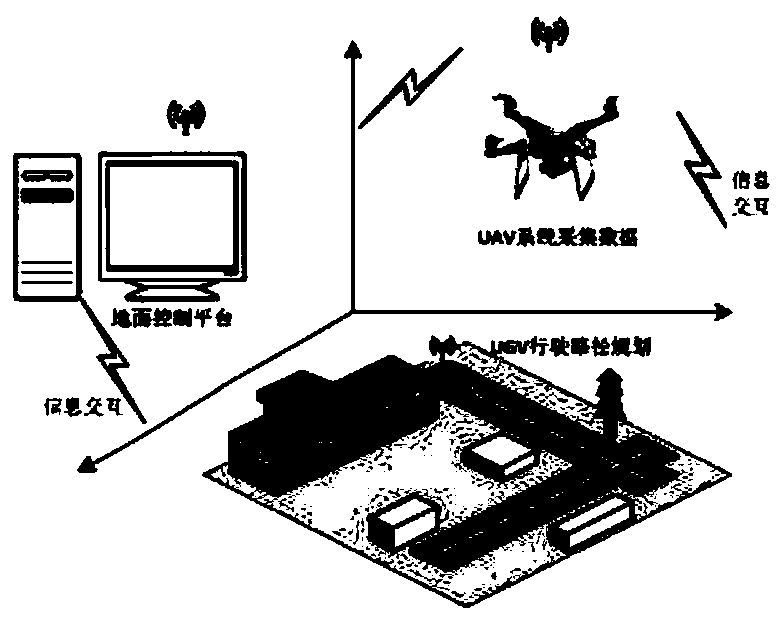
[0043] Environmental modeling and environmental perception: such as figure 1 As shown, the environment model used for UGV path planning is established to realize the information interaction between UAV, UGV and ground working platform. The environment model is as follows: figure 1 As shown, the ground work platform sets the UAV’s flight path, altitude, speed, and UGV’s starting point, end point, driving speed, and visual radius, and then uses the onboard microwav...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More