

Multi-work-type vocational technology work electromechanical artificial limb arm and object sawing method thereof
A professional technology and work technology, applied in the field of prosthetics, can solve the problems of difficulty in combining prosthetics with electric tools, difficult to complete with high quality, and difficult to control operating tools, and achieve the effect of improving efficiency and work quality, low cost, and comfortable wearing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
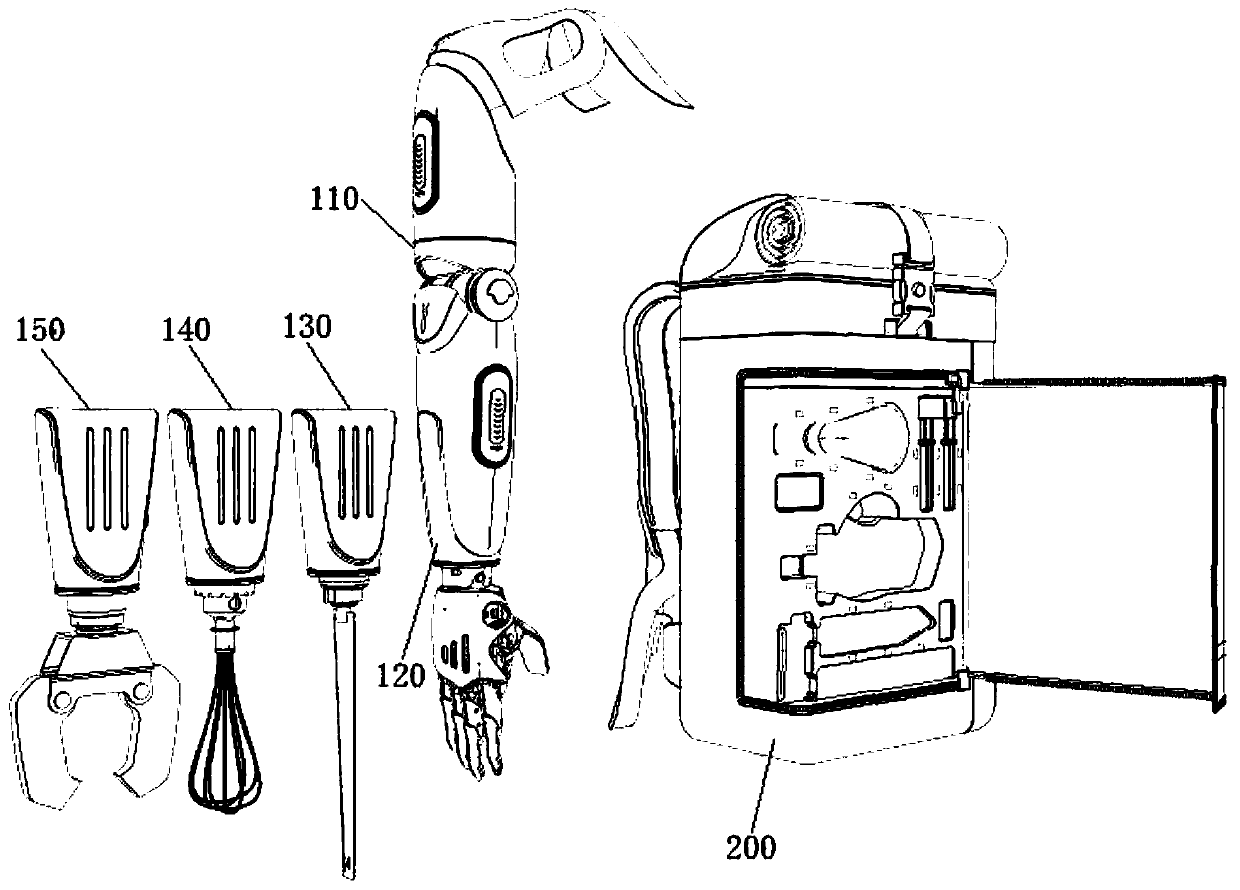
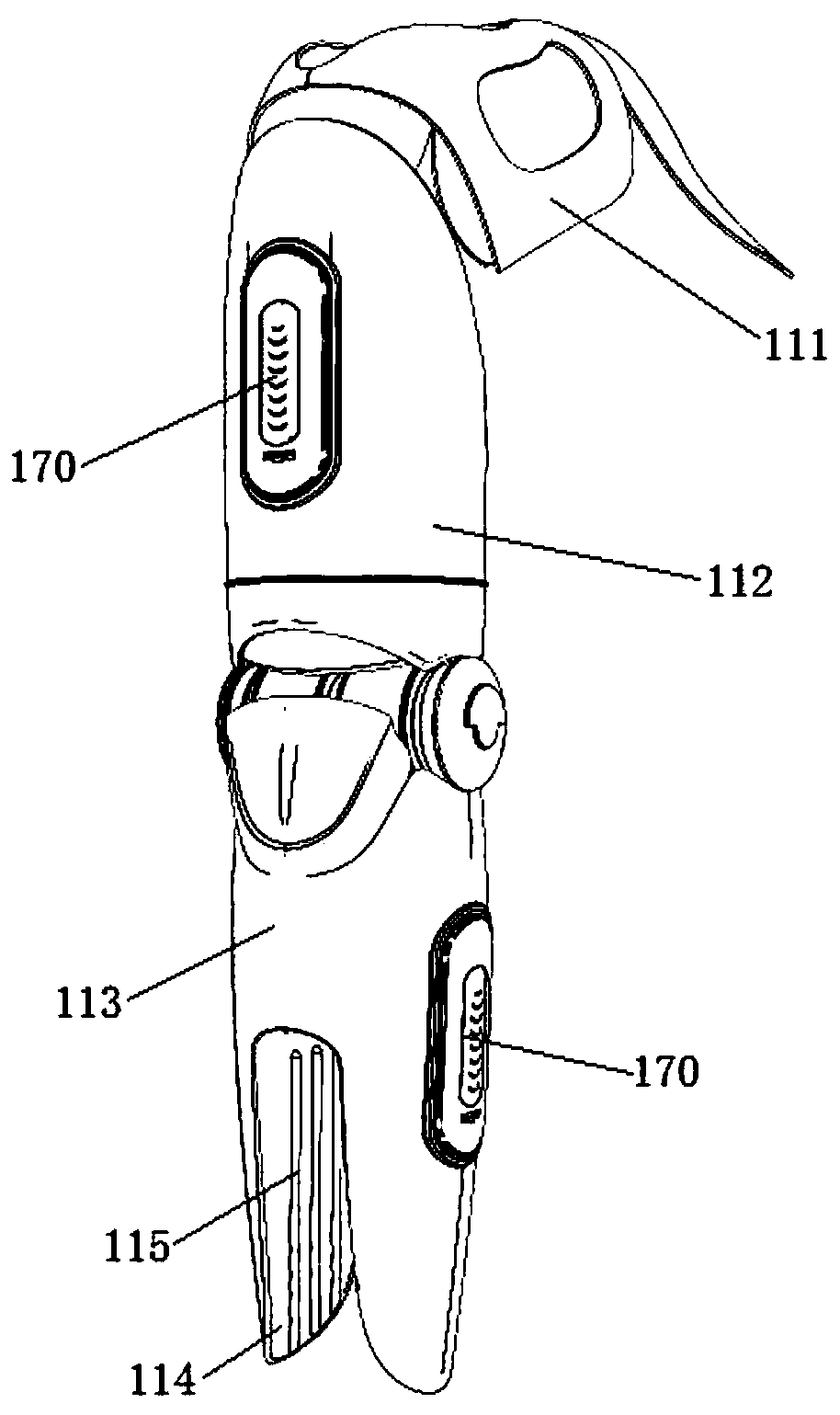
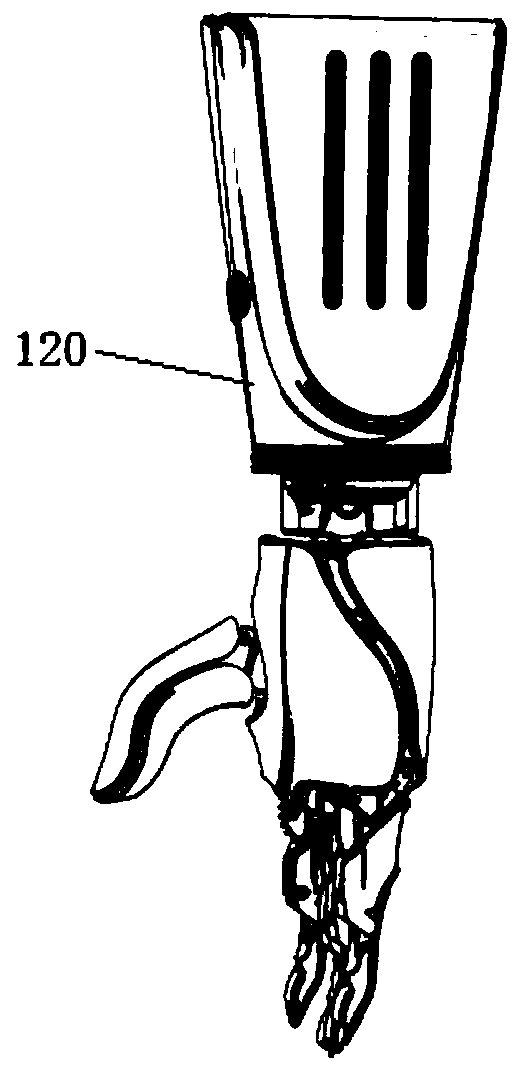
[0037] Such as figure 1 As shown, the present invention provides an electromechanical prosthetic arm for multi-skill occupational and technical work by additive manufacturing, including an upper limb body 110 and a plurality of detachable and replaceable electromechanical tool parts, the upper end of the upper limb body 110 is fixed on the human body, and the The electromechanical tool part is detachably installed on the lower part of the upper limb body 110 . The electromechanical tool part includes a bionic hand 120 , a reciprocating tool part 130 , a first rotary tool part 140 and a second rotary tool part 150 . The present invention also provides a tool backpack 200 used in conjunction with an electromechanical prosthetic arm for multi-skill occupational technical work i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More