

Multi-target path planning method for unmanned cruise ship under dynamic obstacle
A dynamic obstacle and path planning technology, applied in navigation, mapping and navigation, navigation calculation tools, etc., can solve the problems of not being able to traverse multiple target points and affect the operating efficiency of cruise ships, so as to shorten the path planning time and solve the problem of path planning. The effect of planning problems and shortening the time consumed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in detail below in conjunction with the accompanying drawings.
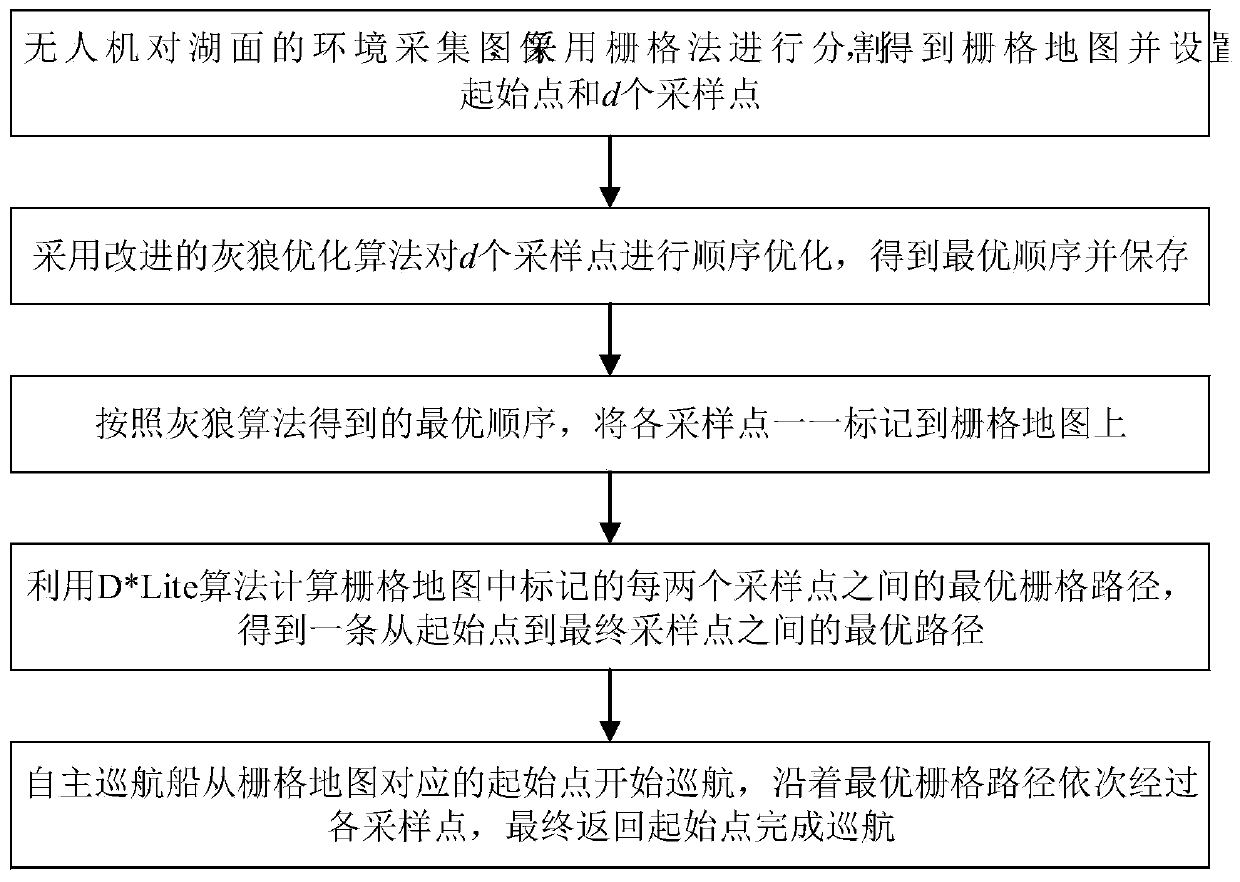
[0057] The present invention proposes a multi-objective path planning method for unmanned cruise ships under dynamic obstacles, using the D*Lite algorithm and the improved gray wolf optimization algorithm to plan the optimal path for the water quality sampling cruise ship to collect multiple target points, such as figure 1 As shown, it specifically includes the following steps:
[0058] Step 1: The UAV collects images of the environment of the lake surface, uses the grid method to segment, obtains the grid map and sets the starting point and d sampling points;
[0059] Specifically: first, divide the lake surface image into grids of equal size to form a grid map; set obstacles in the environment as black grids, fill irregular obstacles, and set feasible areas as white Grid, select and set a starting point and d sampling points using two-dimensional coordinates in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More