

3D acquisition and size measurement method for space field
A technology of 3D and acquisition equipment, applied in the field of 3D topography measurement and topography measurement, can solve the problem that the size of the target object is difficult to accurately determine and cannot be applied, and achieves the effect of strong applicability, improved synthesis accuracy, and increased synthesis speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
[0037] 3D Acquisition Calibration Process
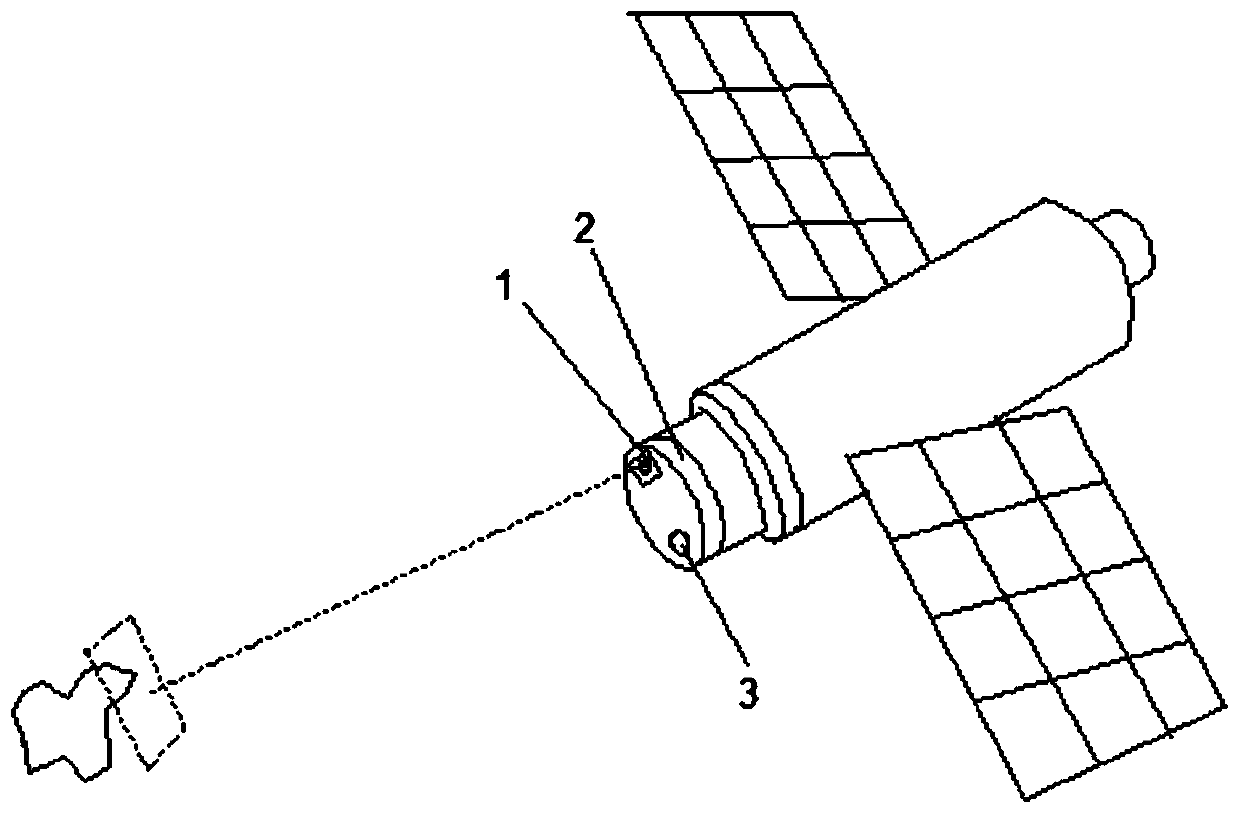
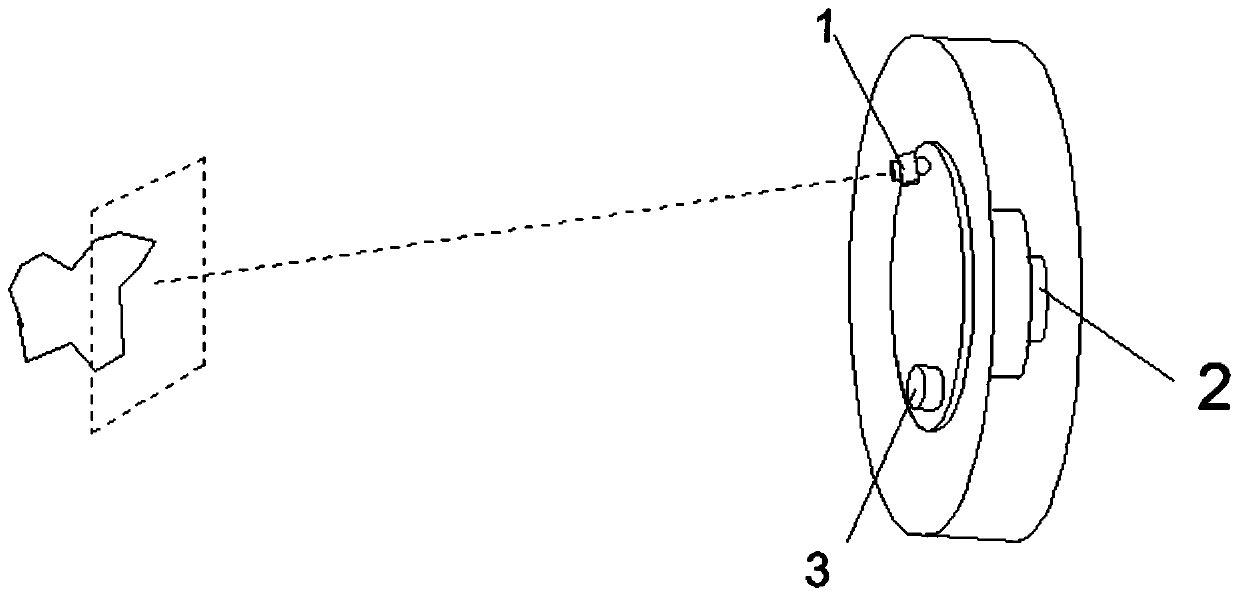
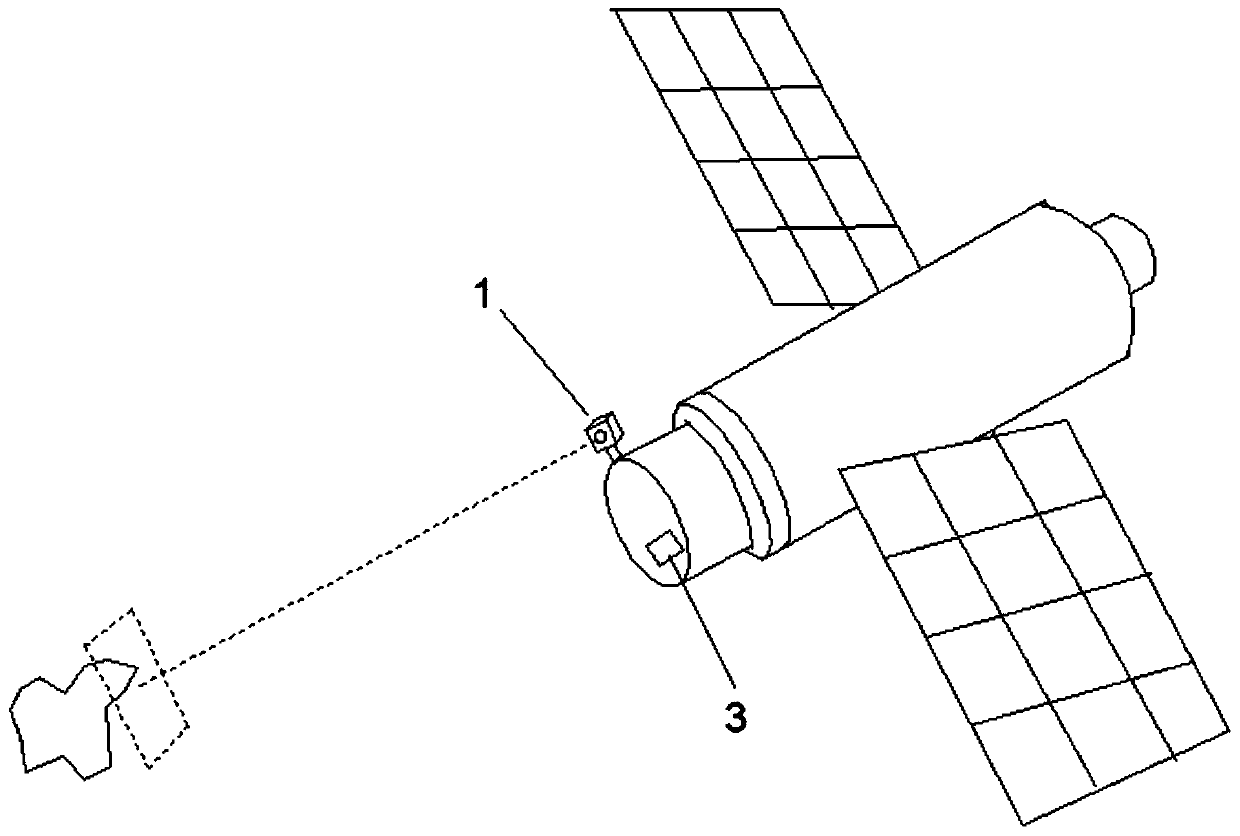
[0038] When the target object to be collected is constantly changing, or the target object is far away, or the mark point cannot be placed on the target object, etc., you can:
[0039] Set the coordinate system xyz to collect the position and attitude of the device, and the coordinate system XYZ to calibrate the space.
[0040] Place a pose sensor on the acquisition device to measure t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More