

A tracking control method and system for a two-stage swing tower crane system
A tracking control and swing-type technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of unfavorable secondary swing type tower crane system transient control, disturbance sensitivity, etc., to improve tracking Performance and anti-swing performance, reduce energy consumption, and improve the effect of transient control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
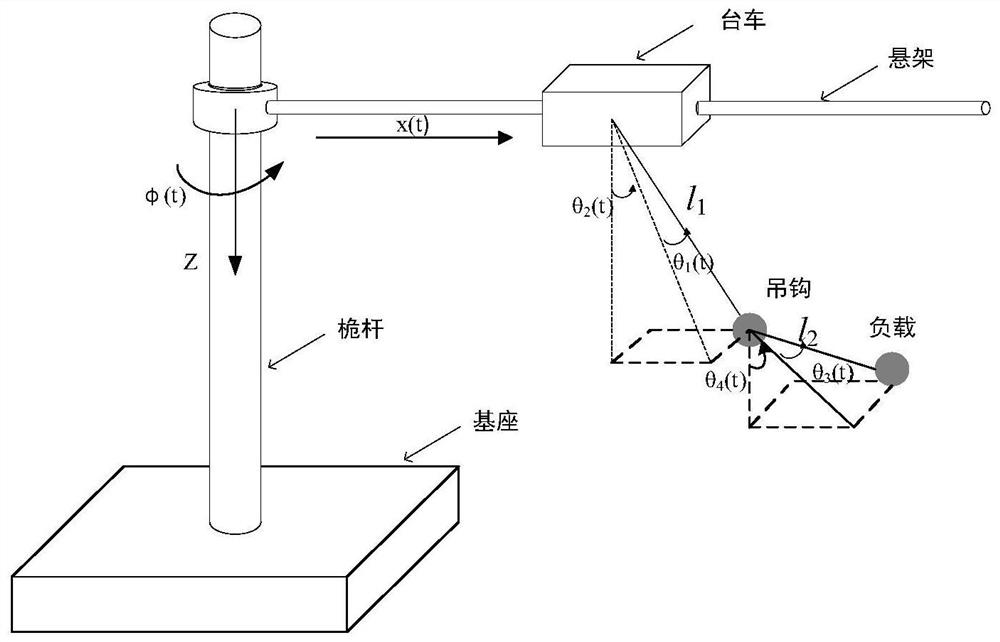
[0038] Embodiment 1 of the present disclosure provides a tracking control method for a two-stage swing type tower crane system, including the following steps:
[0039] Obtain the current position and rotation angle of the cantilever and trolley of the secondary swing type tower crane system;
[0040] According to the current position and rotation angle of the cantilever and trolley and the dynamic equation of the two-stage swing type tower crane system, the disturbance effect index of the load and hook is obtained;
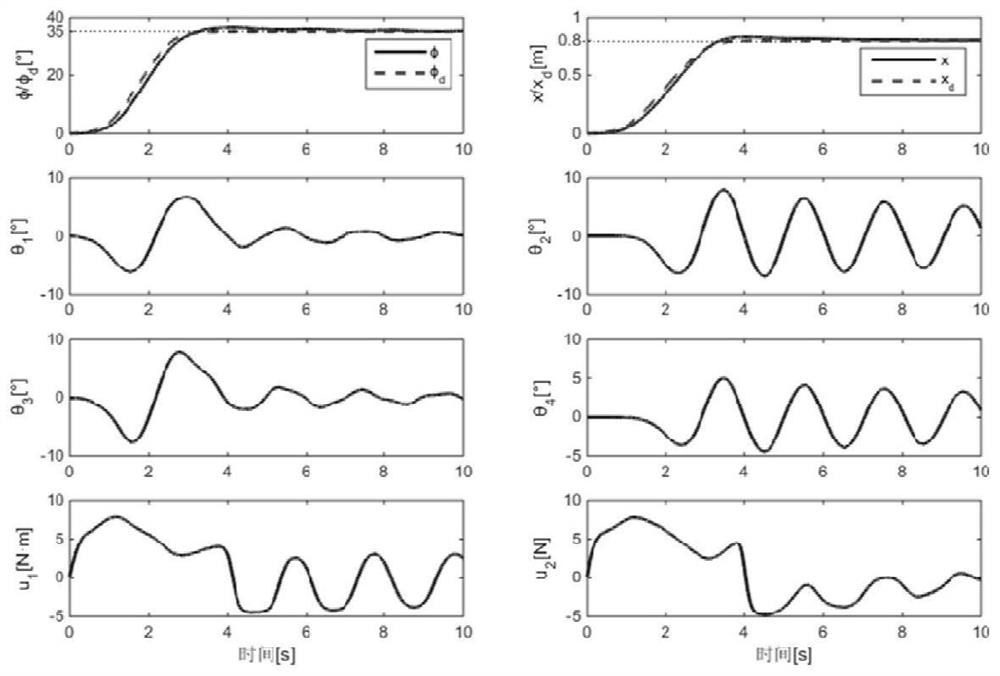
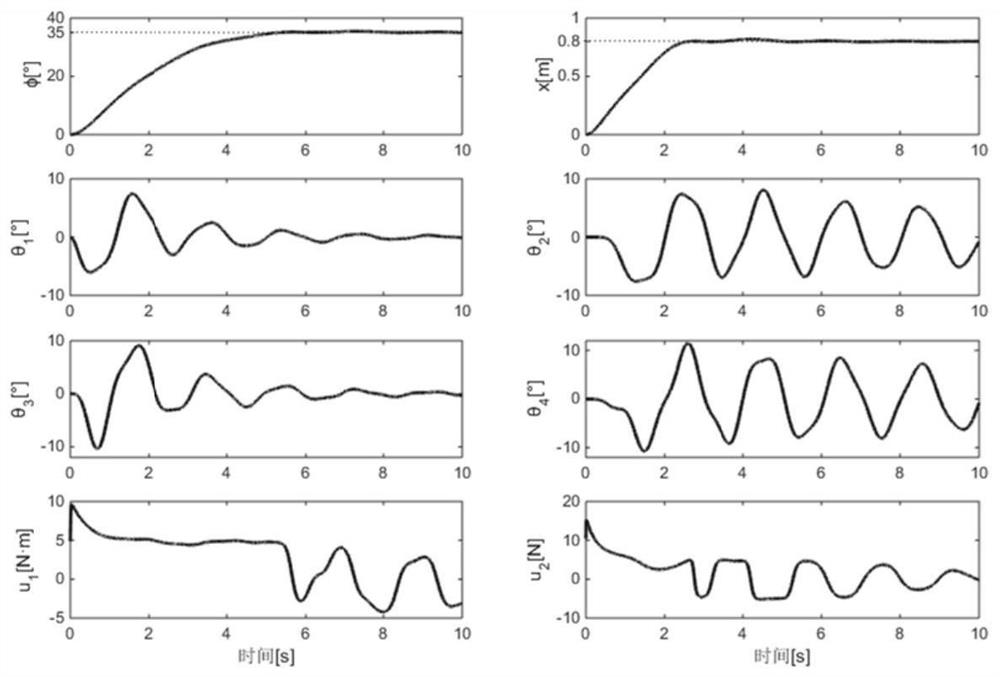
[0041] When the disturbance effect index is greater than the preset threshold, the transient control of the boom and the trolley is performed according to the estimated value of the disturbance and the preset tracking control model; otherwise, the transient control of the boom and the trolley is performed according to the preset tracking control model.
[0042] details as follows:
[0043] (1) Construction of the dynamic model of the two-stage swing tower crane s...
Embodiment 2
[0291] Embodiment 2 of the present disclosure provides a two-stage swing type tower crane system tracking control system, including:
[0292] The data acquisition module is configured to: obtain the current position and rotation angle of the cantilever and the trolley of the secondary swing type tower crane system;
[0293] The disturbance effect index acquisition module is configured to: obtain the disturbance effect index of the load and the hook according to the current position and rotation angle of the boom and the trolley and the dynamic equation of the secondary swing tower crane system;
[0294] The tracking control module is configured to: when the disturbance effect index is greater than the preset threshold value, jointly perform the transient control of the boom and the trolley according to the estimated value of the disturbance amount and the preset tracking control model; otherwise, perform the cantilever control according to the preset tracking control model And...
Embodiment 3
[0297] Embodiment 3 of the present disclosure provides a medium on which a program is stored, and when the program is executed by a processor, the steps in the tracking control method for a two-stage swing type tower crane system as described in Embodiment 1 of the present disclosure are implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More