

Beneficial-disturbance-based sliding mode control method for four-degree-of-freedom tower crane system
A control method and a technology with a degree of freedom, applied in the direction of comprehensive factory control, load suspension components, transportation and packaging, etc., can solve problems such as poor transient control performance, system instability, and affecting system control performance, and achieve good control performance , strong robustness, and the effect of improving transient control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
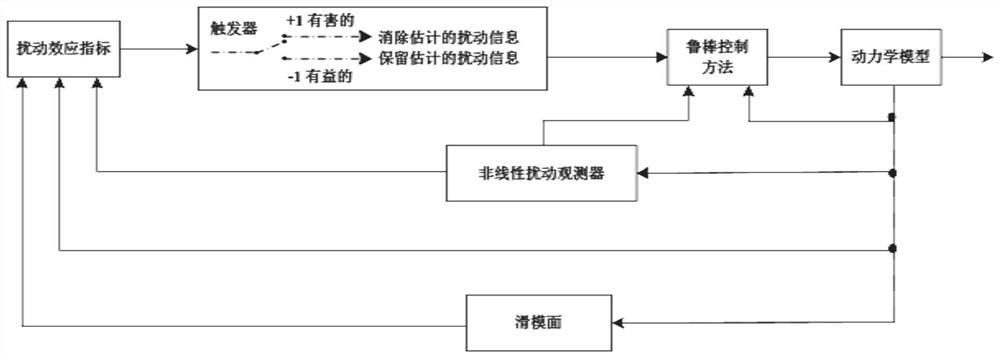
[0035] Embodiment 1 of the present disclosure takes into account the uncertainty / unknownness of the disturbance, and uses a nonlinear disturbance observer to observe it accurately; then, according to the estimated disturbance information, constructs a disturbance effect index to distinguish beneficial disturbances from harmful disturbances; finally, The disturbance effect index and the estimated disturbance information are introduced into the controller design, and a sliding mode control method based on beneficial disturbance is proposed, including the following contents:
[0036] S1: Error model of DOF tower crane system
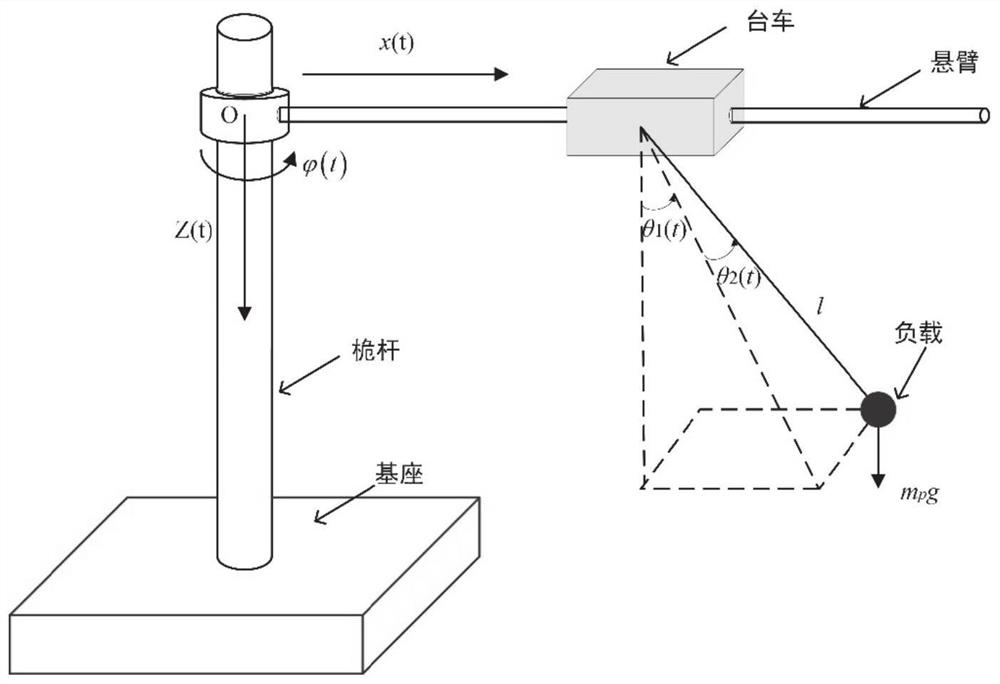
[0037] In this embodiment, the problem of precise positioning and fast anti-swing control of the four-degree-of-freedom tower crane system with disturbance will be considered. According to figure 1 , the dynamic model of the constructed four-degree-of-freedom tower crane system is as follows:
[0038]
[0039]
[0040]
[0041]
[0042] Among t...
Embodiment 2
[0266] Embodiment 2 of the present disclosure provides a sliding mode control system for a four-degree-of-freedom tower crane system based on beneficial disturbances, including:
[0267] The data acquisition module is configured to: acquire parameter data and operating status data of the four-degree-of-freedom tower crane system;
[0268] The disturbance judging module is configured to: use a preset nonlinear disturbance observer to perform disturbance estimation according to the acquired data, and judge beneficial disturbance and harmful disturbance according to a preset disturbance effect index;
[0269] The sliding film control module is configured to: add beneficial disturbances to the preset sliding mode controller, remove harmful disturbances, drive the rotation angle of the cantilever and the displacement of the trolley to reach the desired angle and target position respectively, and make the load swing as Zero or within a preset range.
[0270] The working method of t...
Embodiment 3
[0272] Embodiment 3 of the present disclosure provides a medium on which a program is stored, and when the program is executed by a processor, the sliding mode control method for a four-degree-of-freedom tower crane system based on beneficial disturbances as described in Embodiment 1 of the present disclosure is implemented. in the steps.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More