Active suspension device of wheeled robot
A wheeled robot and active suspension technology, applied in suspension, elastic suspension, transportation and packaging, etc., can solve the problems of suspension design, complex adjustment, affecting observation comfort, fast update, etc., to improve observation Comfort, reduce the risk of leakage, improve the effect of passing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
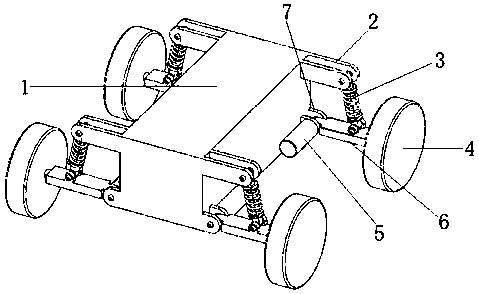
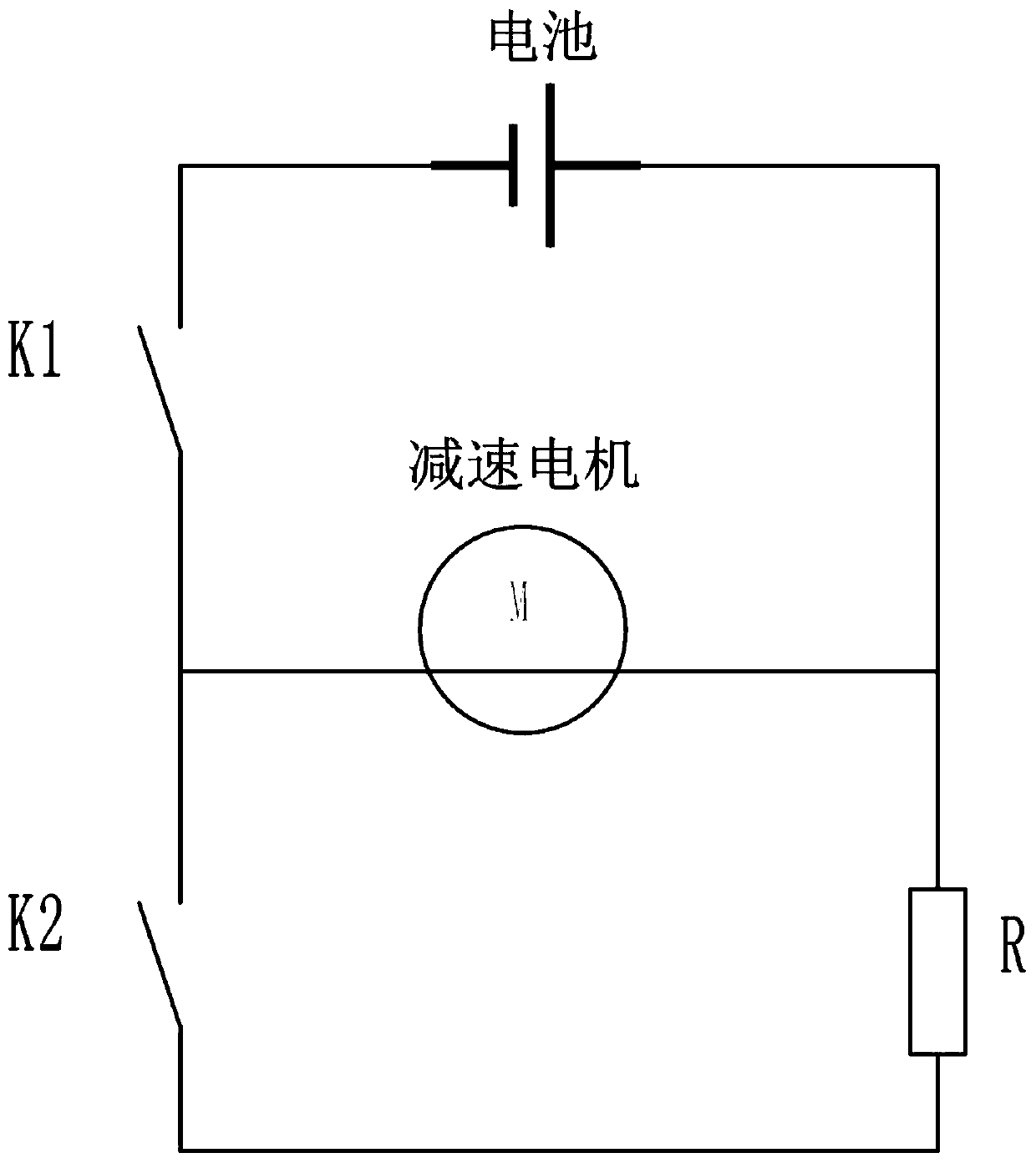
[0021] Such as figure 1 with figure 2 As shown, a wheeled robot active suspension device includes a car body 1, a connecting arm 2, a spring shock absorber 3, a wheel 4, a reduction motor 5 and a rocker arm 6, and one end of the connecting arm 2 is fixed to the car body 1 connected, the other end is rotatably connected with the upper end of the spring shock absorber 3, and the lower end of the spring shock absorber 3 is rotatably connected with the rocker arm 6, and the rocker arm 6 is rotatably connected with the connecting piece 7 arranged on the car body 1 by the car body 1. , the output of the geared motor 5 is fixedly connected with the rocker arm 6, and the coil of the geared motor 5 is connected in parallel with two circuit loops, one of which is connected in series with the switch K2 and the resistor R, and the other loop is connected in series with the battery and the switch K1.
[0022] Work process and working principle of the present invention:
[0023] When the...
Embodiment 2
[0027] On the basis of Example 1, such as figure 1 As shown, the K1 and K2 are electronic devices with switching characteristics. K1 and K2 can be electronic devices with switching functions such as relays, contactors, MOS tubes, triodes, and IGBTs, and the control of K1 and K2 can be realized by installing an existing controller.
Embodiment 3
[0029] On the basis of Example 1, such as figure 1 As shown, the connecting arm 2 is composed of two arm plates arranged side by side, a first fixing pin is arranged between the two arm plates, and the first fixing pin is rotatably connected to the upper end of the spring shock absorber 3 . This embodiment specifically explains the rotational connection between the spring damper 3 and the connecting arm 2 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More