

Fast lane line detection method based on parameter space voting and Bessel fitting
A technology of lane line detection and parameter space, applied in the field of image processing, can solve the problems of low efficiency of lane line detection, achieve good anti-interference, avoid complex calculations, and improve detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0071] The present invention will be described in detail below with reference to the accompanying drawings and examples, but the protection scope of the present invention is not limited to the scope expressed in the embodiments.
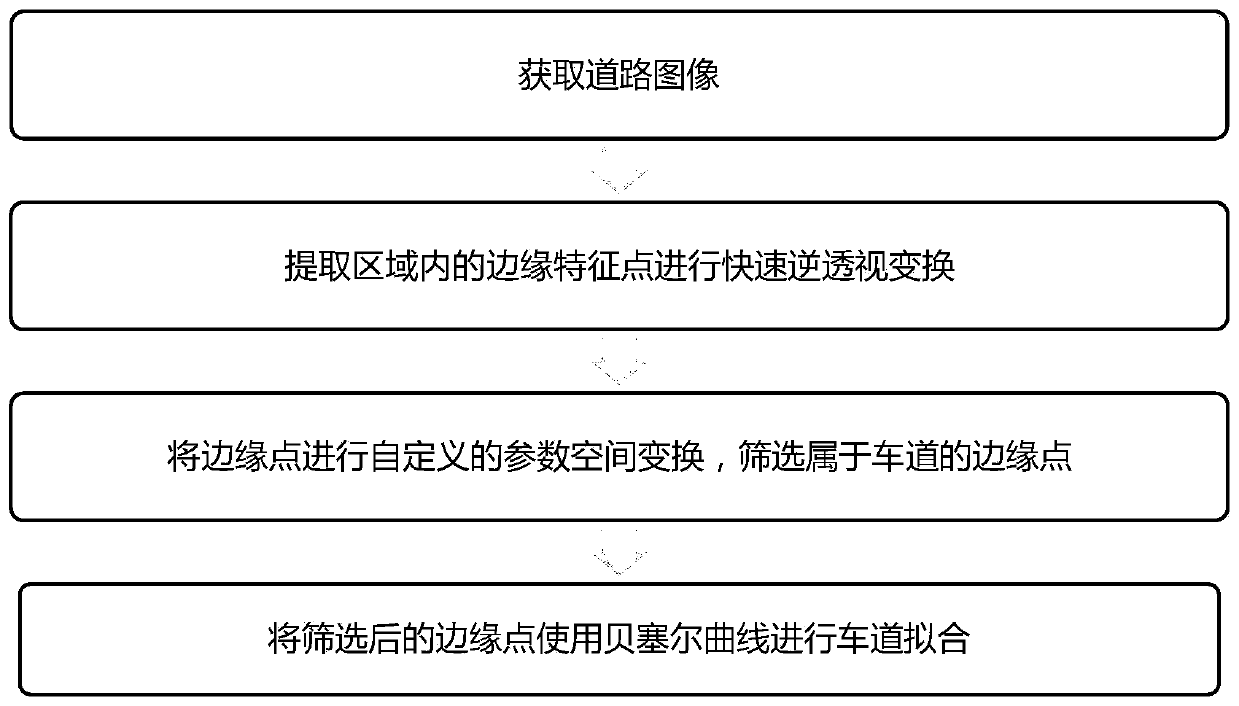
[0072] Algorithm flow chart diagram of the present invention is as figure 1 As shown, it specifically includes the following steps:
[0073] Step (1) Obtain the image to be detected. The detection data are road images in various environmental scenarios, including rainy days, nights, daytime and other scenes, as well as complex road conditions such as vehicle interference, strong light, and road water stain interference. Convert to grayscale image;
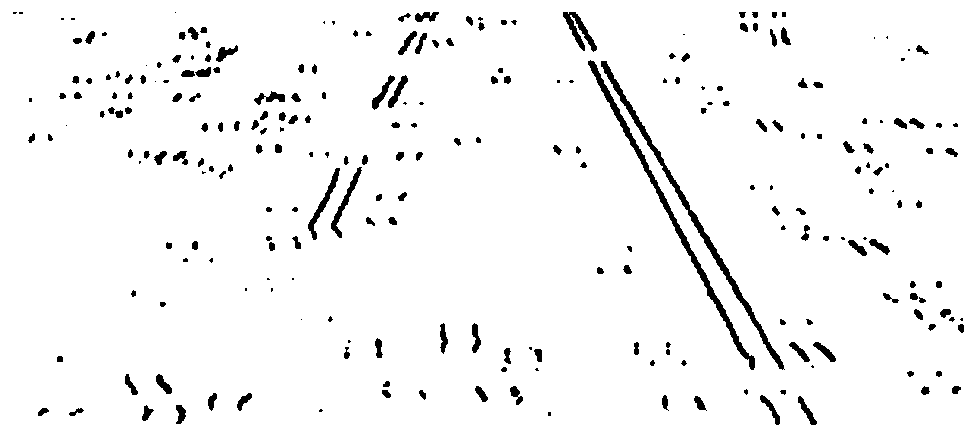
[0074] Step (2) extracting the edge feature points in the region of interest for fast inverse perspective transformation;
[0075] Step (3) Perform a custom parameter space transformation on the edge points, and filter the edge points belonging to the lane
[0076] Step (4) carrying out Bezier curve fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More