

Robot Trajectory Tracking Control Method Based on Vision Guidance
A control method and trajectory tracking technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of principle error, poor real-time performance, limited measurement frequency, etc. Error reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
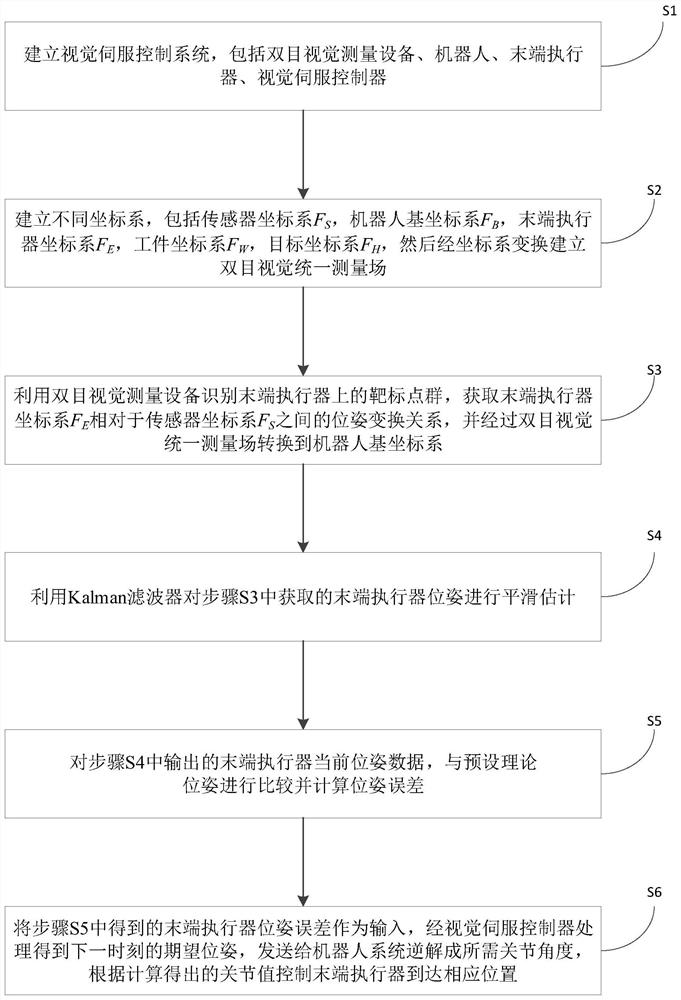
[0039] Such as Figure 1-4 Shown, the present invention is a kind of robot trajectory tracking control method based on visual guidance, which comprises the following steps:
[0040] Step S1: Establish a visual servo control system, including binocular visual measurement equipment, a robot, an end effector, and a visual servo controller;
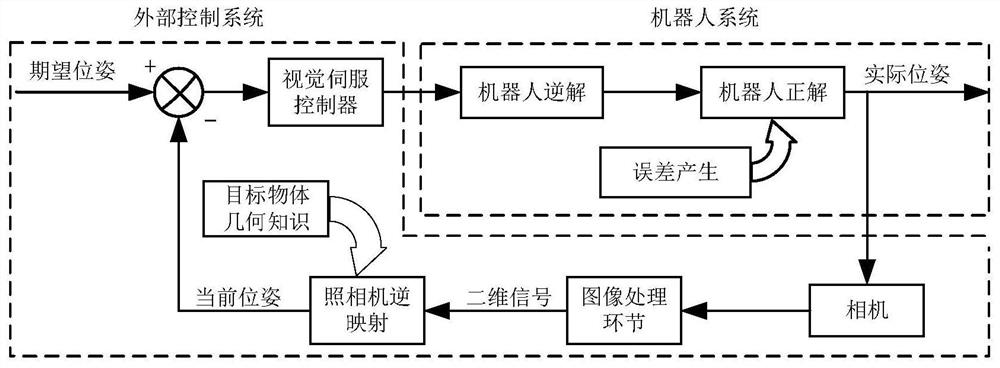
[0041] Specifically, the actual pose of the robot end effector is tracked and measured in real time by binocular vision measurement equipment, and a closed-loop loop is added to form a closed-loop control system. The pose error obtained by the closed-loop feedback is processed by the visual servo controller to obtain the next moment. The expected pose is sent to the robot system for inverse analysis into the required joint angles, and the motor is controlled to reach the corresponding position according to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More