

Unmanned aerial vehicle control method for target continuous observation
A control method and unmanned aerial vehicle technology, applied in the direction of attitude control, non-electric variable control, control/adjustment system, etc., can solve the problems of difficult unmanned aerial vehicle attitude control, large discipline coupling, and prone to crash accidents, etc., to achieve The guidance method is simple and feasible, and the effect of the algorithm calculation is small
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
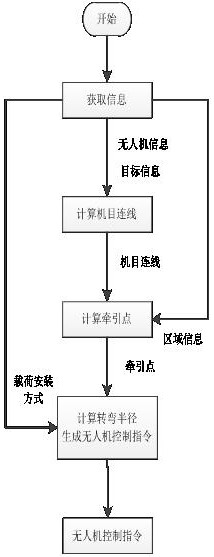
Method used
Image

Examples
Embodiment Construction
[0038] Specific embodiments of the present invention will be described in detail below. In the following description, for purposes of explanation and not limitation, specific details are set forth in order to provide a thorough understanding of the invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced in other embodiments that depart from these specific details.
[0039] It should be noted here that, in order to avoid obscuring the present invention due to unnecessary details, only the device structure and / or processing steps closely related to the solution according to the present invention are shown in the drawings, and the steps related to the present invention are omitted. Invent other details that don't really matter.
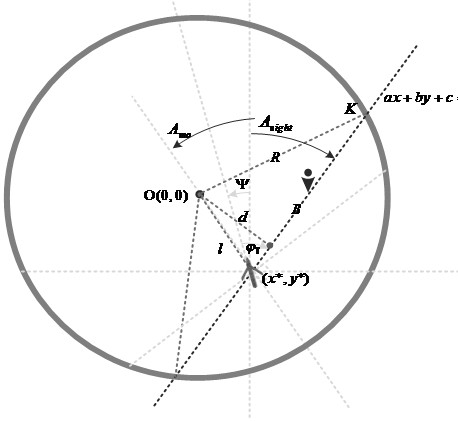
[0040] In the present invention, the roughly scattered area of the target is known (the area where the target may exist is guaranteed by the rough target indication accuracy of the passive detecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More