

Human-computer interaction force acquisition system
A technology of human-computer interaction and acquisition system, which is applied in the field of rehabilitation robots, can solve the problems of waste of labor and time, and achieve the effect of casual inflation and replacement, low cost, and accelerated rehabilitation of lower limbs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
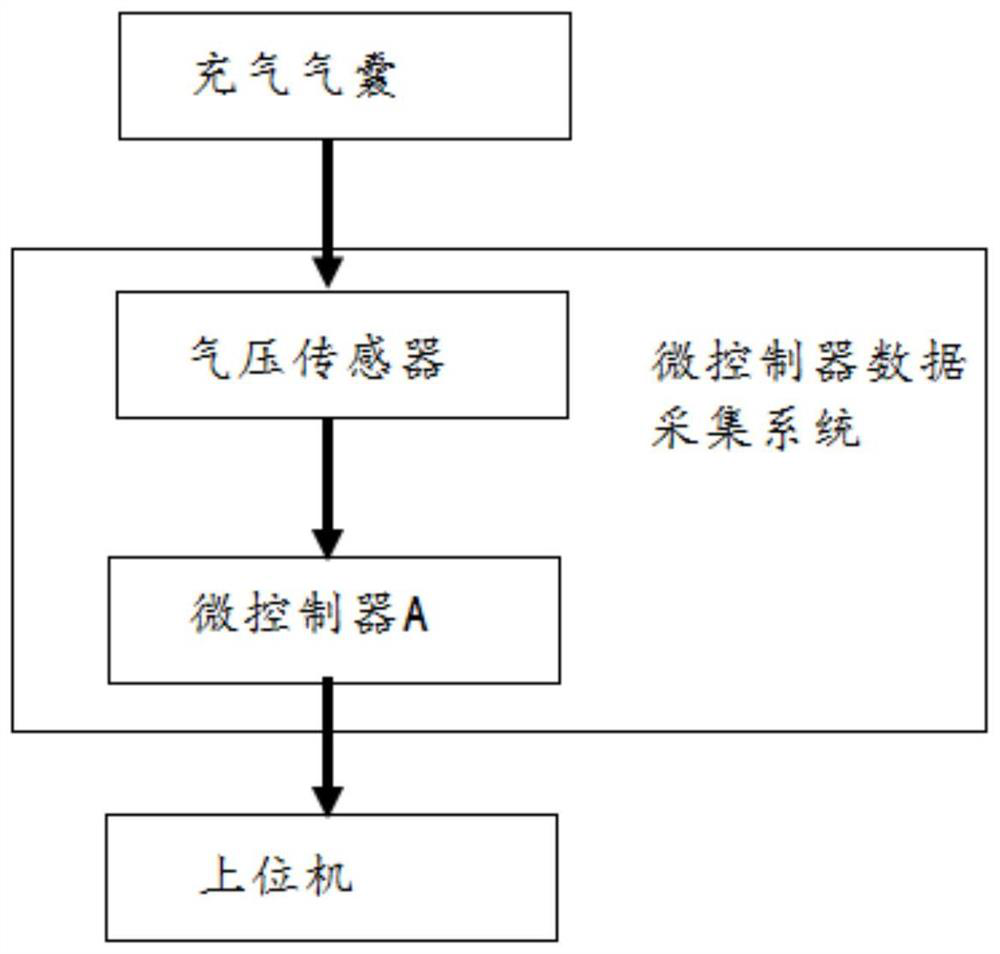
[0023] see figure 1 , this embodiment discloses a human-computer interaction force acquisition system, including an inflatable airbag, a microcontroller data acquisition system and a host computer, the inflatable airbag is installed on the lower extremity exoskeleton and fixed on the human thigh and / or via the lower extremity exoskeleton Or the front and rear sides of the human calf; the microcontroller data acquisition system includes a microcontroller A and an air pressure sensor, the microcontroller A and the air pressure sensor are connected through WiFi communication, and powered by the same mobile power supply, the The mobile power supply is fixed on the human body through a binding device, and is electrically connected to the microcontroller A and the air pressure sensor through wires to supply power to the microcontroller A and the air pressure sensor; the air pressure sensor (the air pressure sensor adopts a differential air pressure sensor DLH-L30D -E1BD-C-NAV8) has ...
Embodiment 2
[0026] Similar to Embodiment 1, the difference is that the microcontroller A is connected to the air pressure sensor through wire communication, the microcontroller A is connected to the mobile power supply through the wire, and the mobile power supply supplies power to the microcontroller A, and the microcontroller A then Power the air pressure sensor.
Embodiment 3
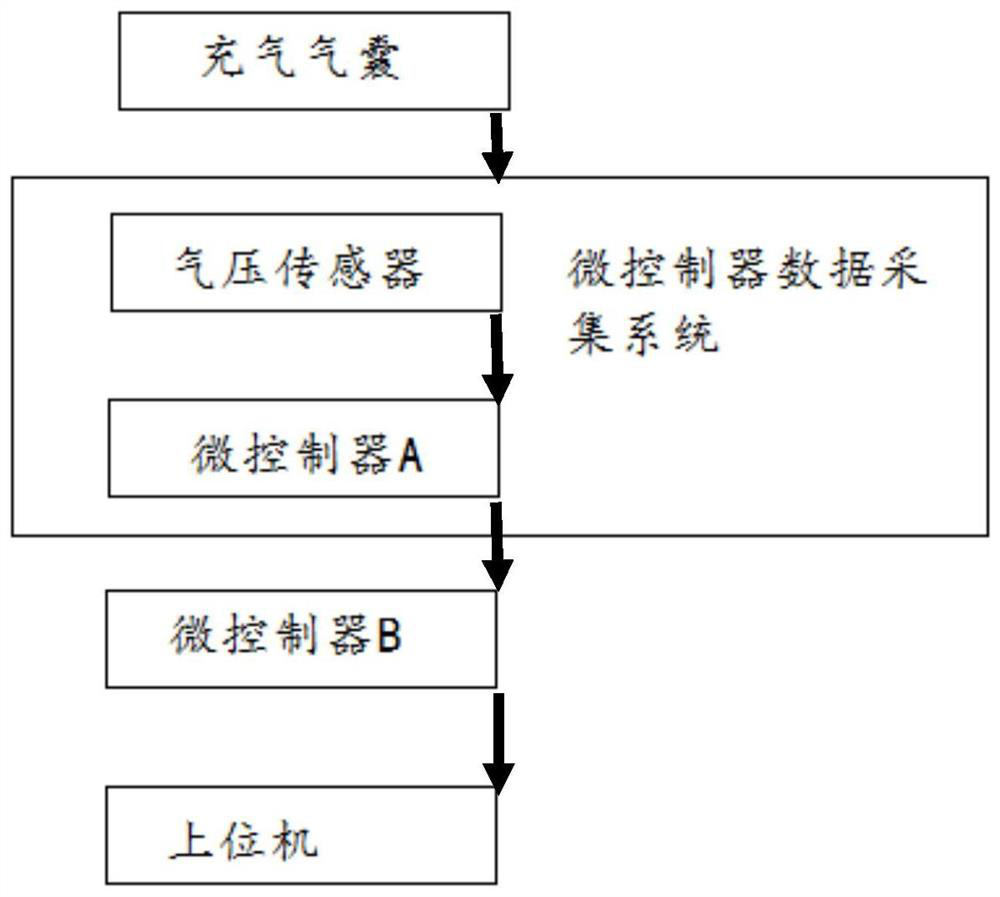
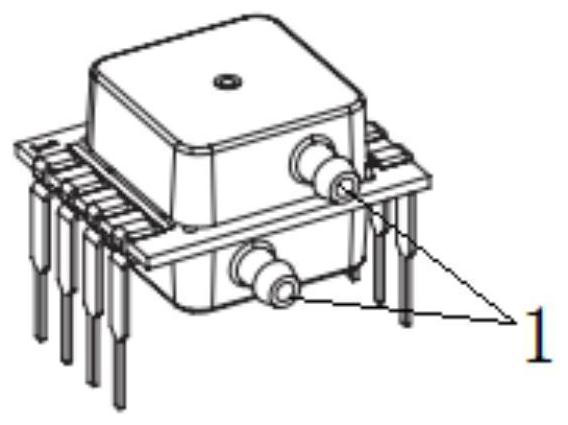
[0028] see figure 2 , this embodiment discloses a human-computer interaction force acquisition system, including an inflatable airbag, a microcontroller data acquisition system, a microcontroller B and a host computer, the inflatable airbag is installed on the lower extremity exoskeleton and fixed by the lower extremity exoskeleton On the front and rear sides of the human thigh and / or human calf; the microcontroller data acquisition system includes a microcontroller A and an air pressure sensor, and the microcontroller A is connected to the air pressure sensor through WiFi communication; the microcontroller B is connected to the microcontroller A through WiFi communication, and the microcontroller A transmits the collected data information to the microcontroller B, and the microcontroller B has a built-in data processing program for processing the data collected by the microcontroller data acquisition system Data information. The air pressure sensor is provided with two gas ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More