

Foot-type desktop pet robot desktop edge detection system and edge avoidance method
An edge detection and robotics technology, applied in the field of robotics, can solve the problems of undetectable desktop edges, drop damage, etc., so as to avoid desktop drop damage and increase fun
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
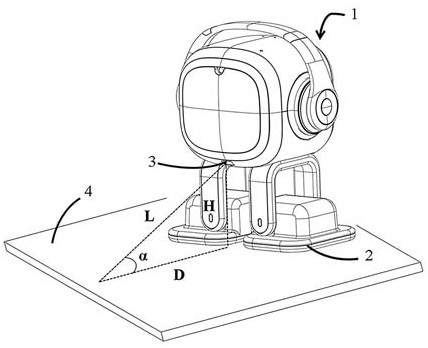
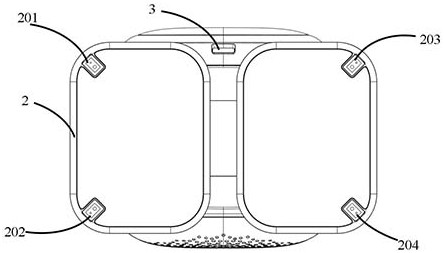
[0035] A desktop edge detection system for a foot-type desktop pet robot, comprising a miniature laser ranging sensor 3, a plantar light sensor array, and the light sensor array includes a right foot front light sensor 201; a right foot rear light sensor 202; a left foot front light sensor sensor 203; light sensor 204 behind the left foot;
[0036] Such as figure 1 As shown, the desktop pet robot 1 has a biped structure, and the emission direction of the miniature laser ranging sensor 3 forms a certain angle α with the horizontal direction, and is installed obliquely downward;
[0037] Such as figure 2 As shown, the desktop pet robot 1 is provided with two photosensors on each sole 2; the two photosensors on each sole 2 are arranged on the outer edge of the sole and are inclined at 45 degrees; each photosensor It includes an infrared emitting tube and an infrared receiving tube; when each light sensor is installed, the infrared emitting tube is on the outside, and the infra...
specific Embodiment approach 2
[0039] An edge avoidance method based on the desktop edge detection system of the desktop pet robot, comprising:
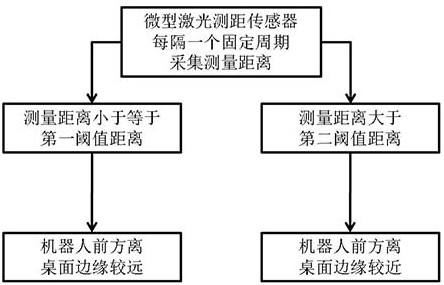
[0040] Such as image 3 As shown, the miniature laser ranging sensor 3 collects the measurement distance d every fixed period T1, compares the measurement distance d with the first threshold distance d1, and if the measurement distance is less than or equal to the first threshold distance d1, the distance in front of the robot is If the distance from the edge of the desktop 4 is greater than D=H / tanα, it is considered that the front of the robot 1 is far away from the edge of the desktop 4; compare the measured distance d with the second threshold distance d2, if the measured distance d is greater than the second threshold distance d2, the front of the robot is far away from the edge of the desktop 4. The distance from the edge of desktop 4 is less than D=H / tanα, it is considered that the front of robot 1 is closer to the edge of desktop 4;
[0041] The value met...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More