

Dexterous hand control method, device and terminal equipment
A control method and dexterous hand technology, applied in the field of dexterous hand control, can solve the problem of low control precision of dexterous hand, and achieve the effect of improving control precision and good self-adaptive ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
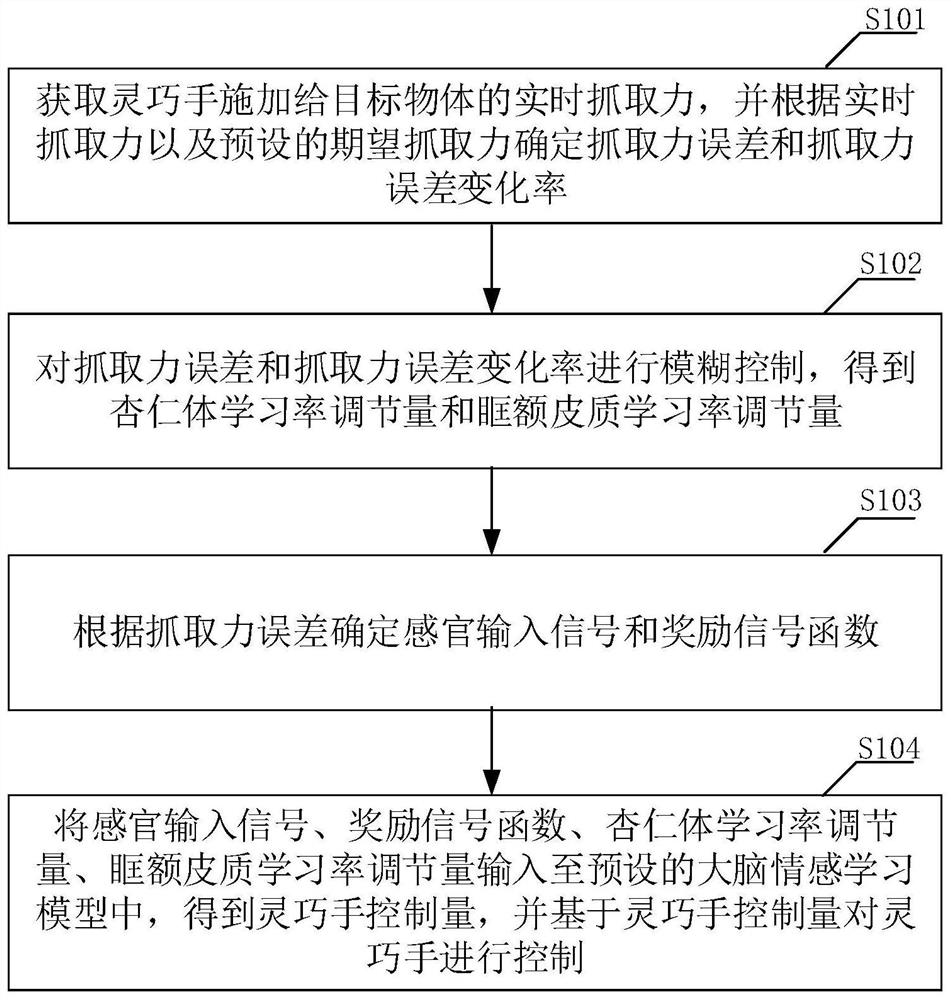
[0060] Optionally, as a specific implementation of the dexterous hand control method provided in the embodiment of the present invention, the sensory input signal and the reward signal function are determined according to the grasping force error, including:
[0061] SI=K 1 e+K 2 ∫edt
[0062] Among them, SI is the sensory input signal, e is the grasping force error, K 1 、K 2 is the preset adjustment factor.
[0063] REW=K 3 e+K 4 ∫edt+K 5 u
[0064] Among them, REW is the reward signal function, K 3 、K 4 、K 5 is the preset adjustment coefficient, and u is the dexterous hand control amount corresponding to the last control cycle.
[0065] Optionally, as a specific implementation of the dexterous hand control method provided in the embodiment of the present invention, the preset brain emotion learning model includes amygdala and orbitofrontal cortex.
[0066] Input the sensory input signal, reward signal function, amygdala learning rate adjustment, and orbitofrontal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More