

Snake-shaped robot snake body joint with three-way steering engine orthogonal connection structure
A snake-shaped robot and orthogonal connection technology, applied in the field of bionic robots, can solve problems such as insufficient spatial freedom, unreasonable structural design, and inflexible movement, achieving flexible movement, solving inflexible movement, and high spatial freedom Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
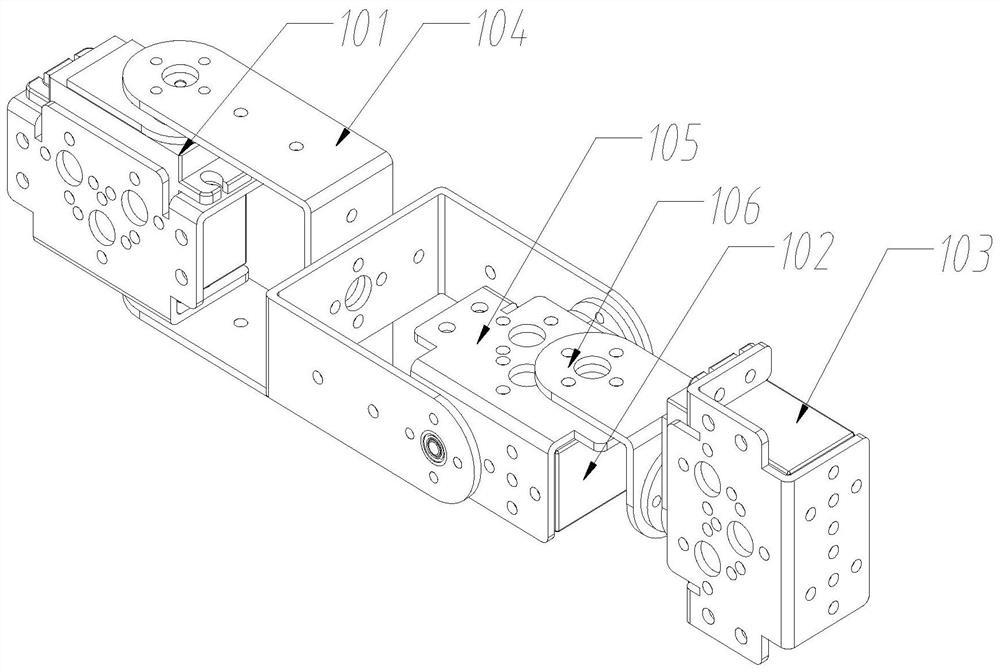
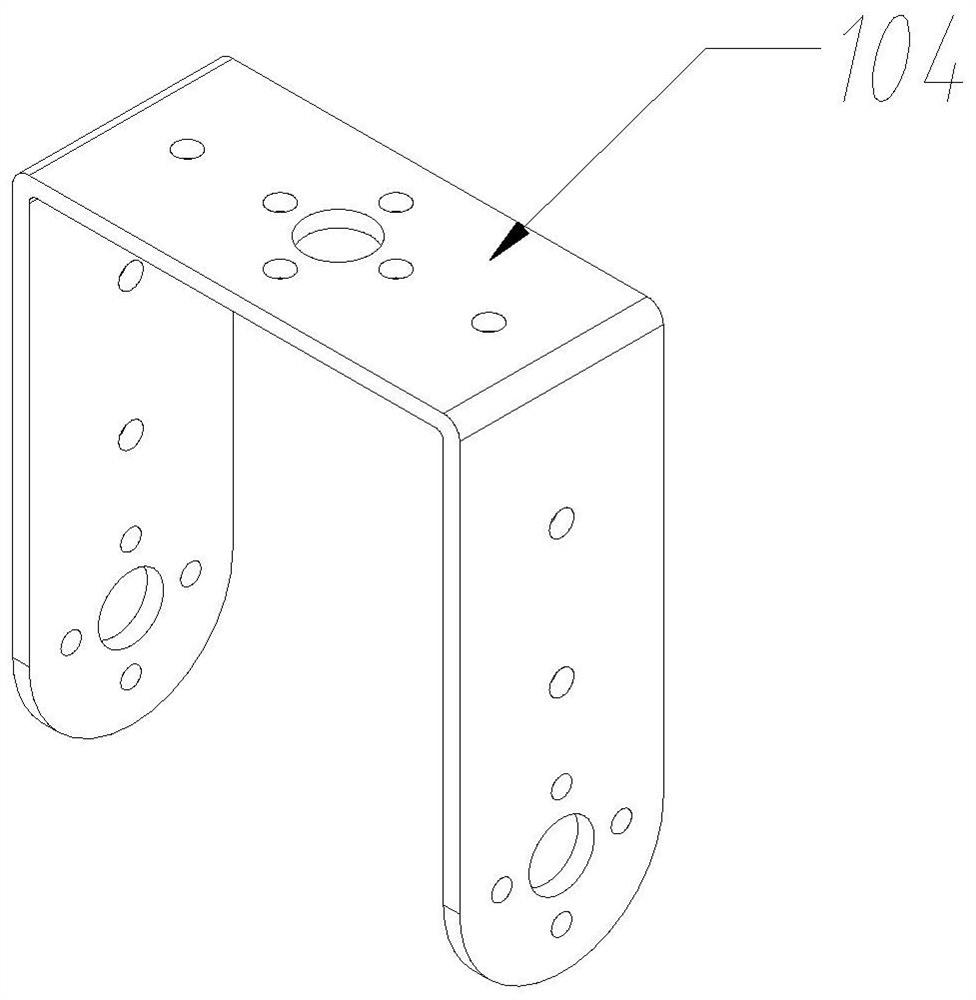
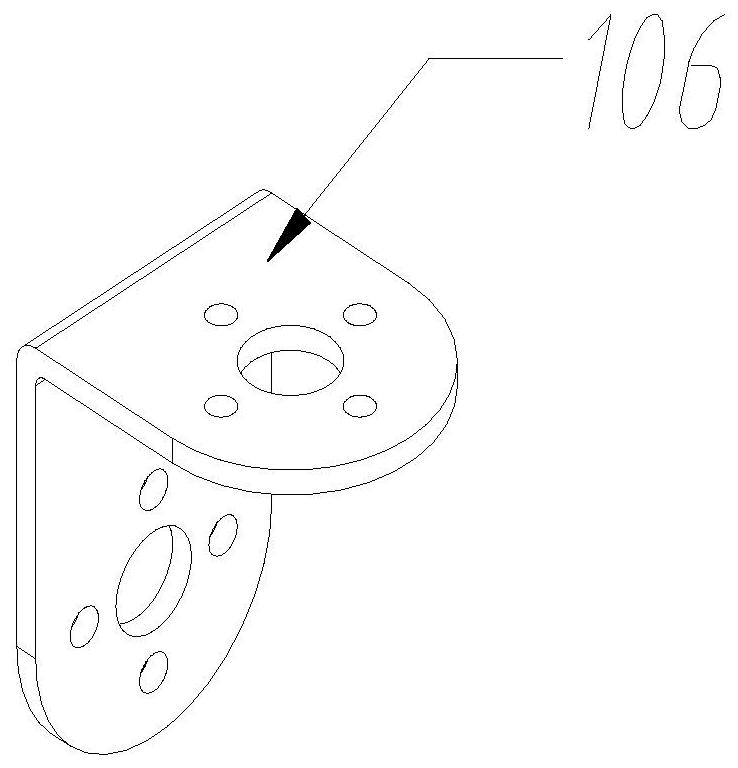
[0015] Attached below Figures 1 to 4 , to further illustrate a specific embodiment of a snake body joint of a snake robot with a three-way steering gear orthogonal connection structure of the present invention.
[0016] like figure 1 As shown, it is a snake body joint of a snake-shaped robot with a three-way steering gear orthogonal connection structure. The snake body joint is provided with an X-direction steering gear (101) and a Y-direction steering gear (103) whose output shaft is in the horizontal direction. , the output shaft is the Z steering gear (102) in the vertical direction, the output direction of the X steering gear (101) and the Y steering gear (103) are vertically orthogonal in the plane space, and the Z steering gear ( The output direction of 102) is vertically orthogonal to the output direction of the X-direction steering gear (101) Y-direction steering gear (103) in space, and the X-direction steering gear (101) Y-direction steering gear (103) Z-direction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More