

Carrying collision detection method and device for robot
A technology of collision detection and robotics, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor timeliness and achieve the effect of improving timeliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
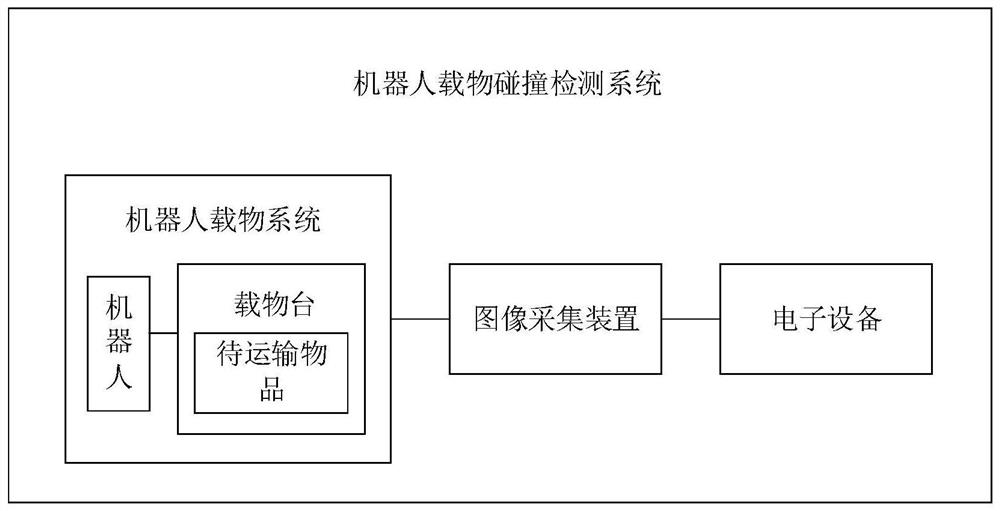
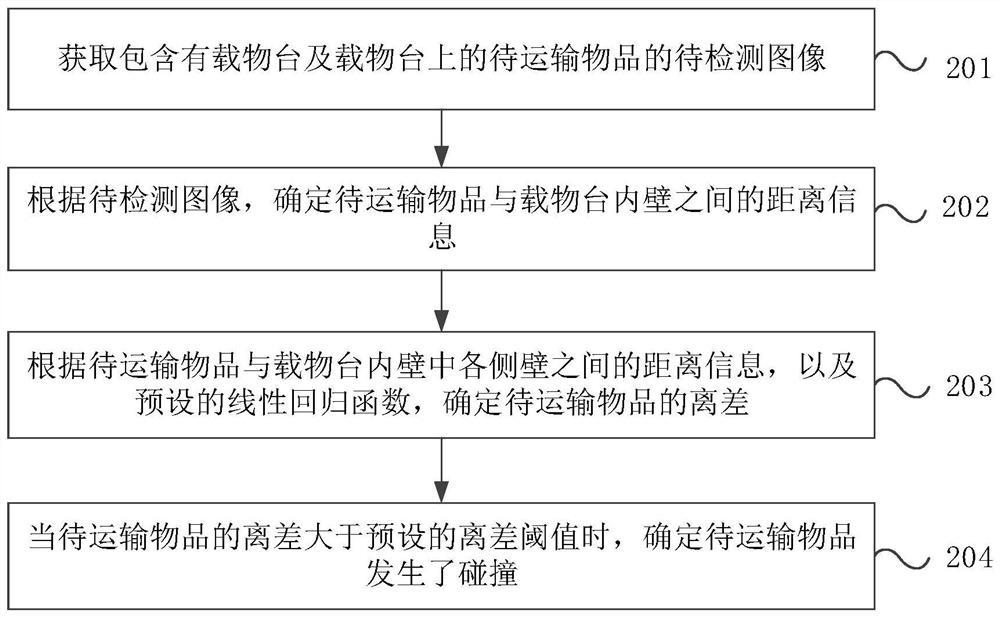
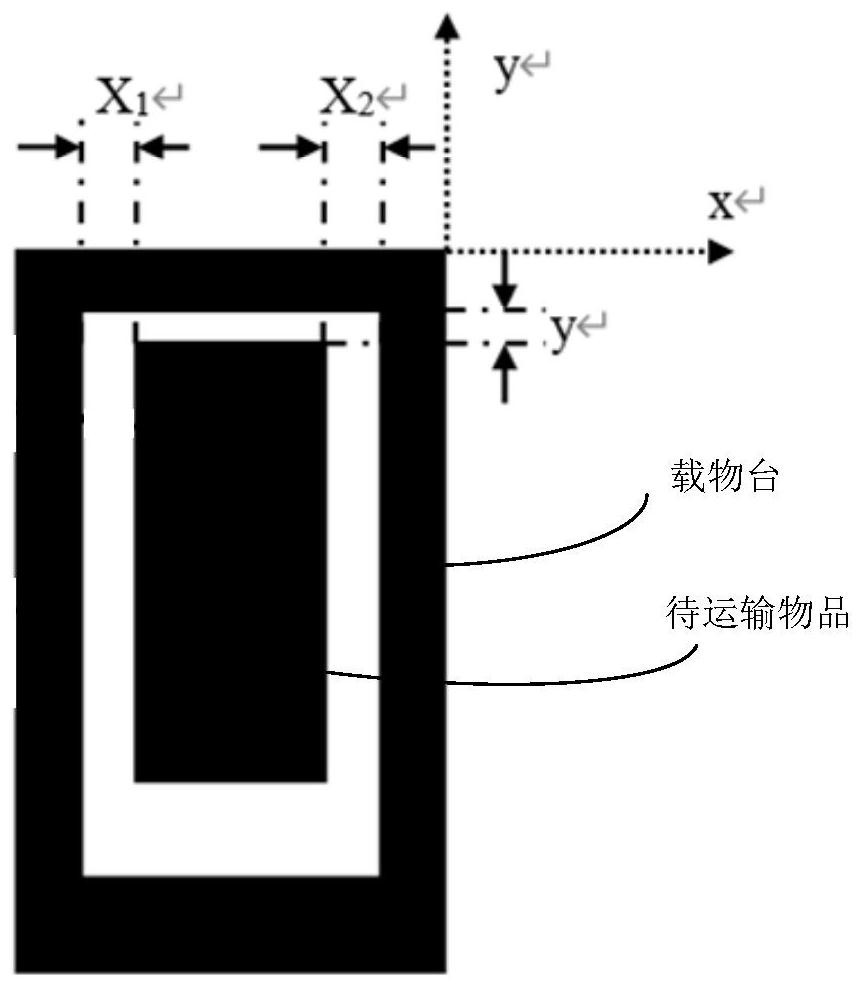
[0054] In the prior art, for a robot used for parts assembly, the quality inspection is usually only performed on the assembled product. If it is determined that the product has no quality problems, it is determined that the robot has not collided during the parts transportation process. However, if the existing technology is used to detect whether parts have collided during transportation, the detection results have a problem of poor timeliness. Moreover, due to the inability to detect the collision of parts ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More