

Method for judging ending of edge-walking behavior of robot, chip and robot
A robot and behavioral technology, applied in the direction of instruments, two-dimensional position/channel control, non-electric variable control, etc., can solve problems such as inaccurate judgments, and achieve the effect of overcoming misjudgment problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
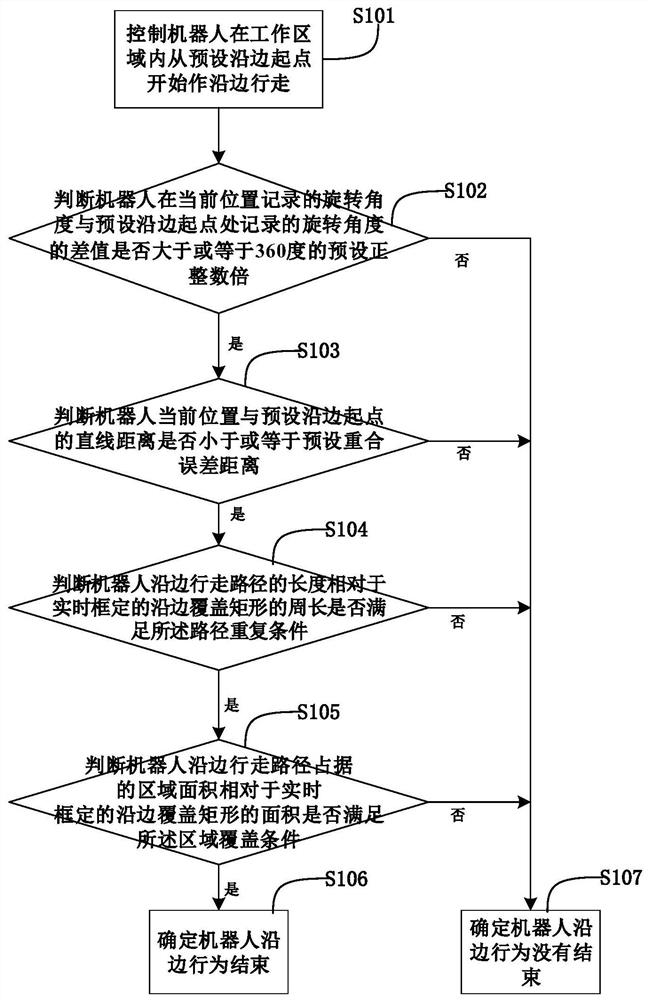
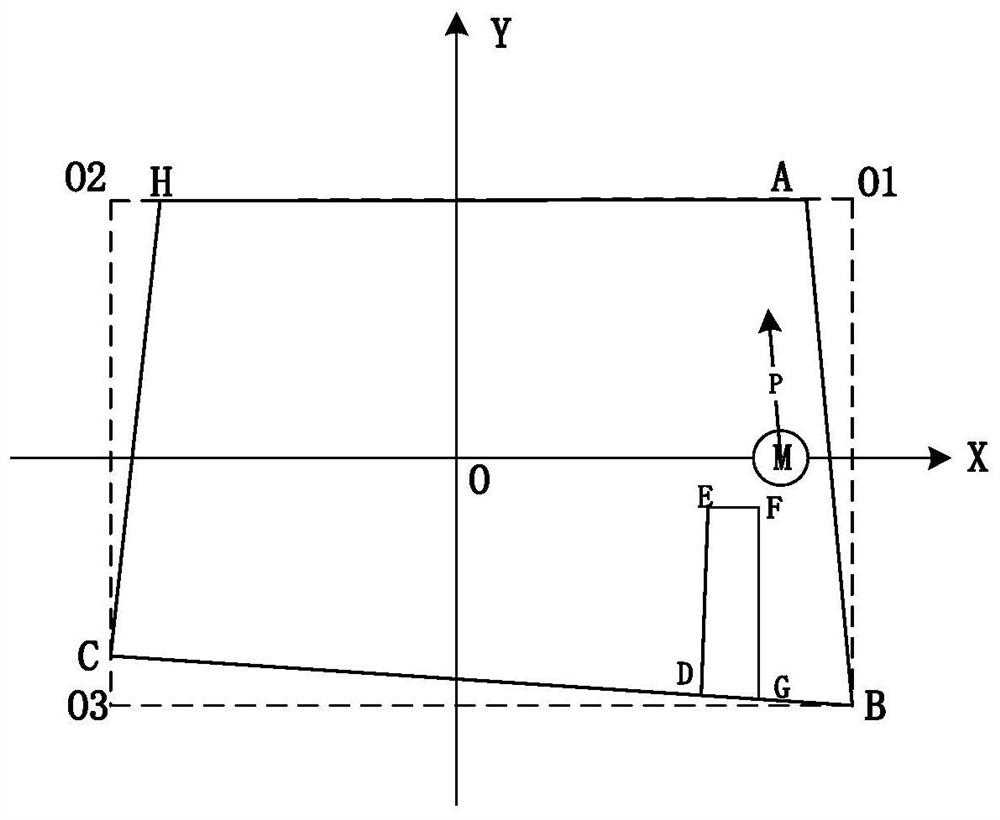
[0017] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention.
[0018] In the embodiment of the present invention, the robot starts from any position in the room to search for wall obstacles. When a wall is detected, the robot’s forward direction is adjusted to be parallel to the wall, and then the position where the wall is detected is recorded as the preset starting point along the edge. , record the coordinates of the robot and the forward angle of the robot (the angle of the robot’s forward direction relative to the X-axis direction or the angle of the robot’s forward direction relative to the Y-axis direction) in the real-time constructed map, and then start from this preset starting point along the edge. Walk along the side parallel to the wall (walking along the wall), wherein the forward direction of the robot is adjusted to be parallel to the exten...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More