

SLAM method of RGB-D camera in dynamic scene
A dynamic scene, RGB image technology, applied in the field of computer vision, can solve the problems of time-consuming, high computational cost, and difficult to run.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
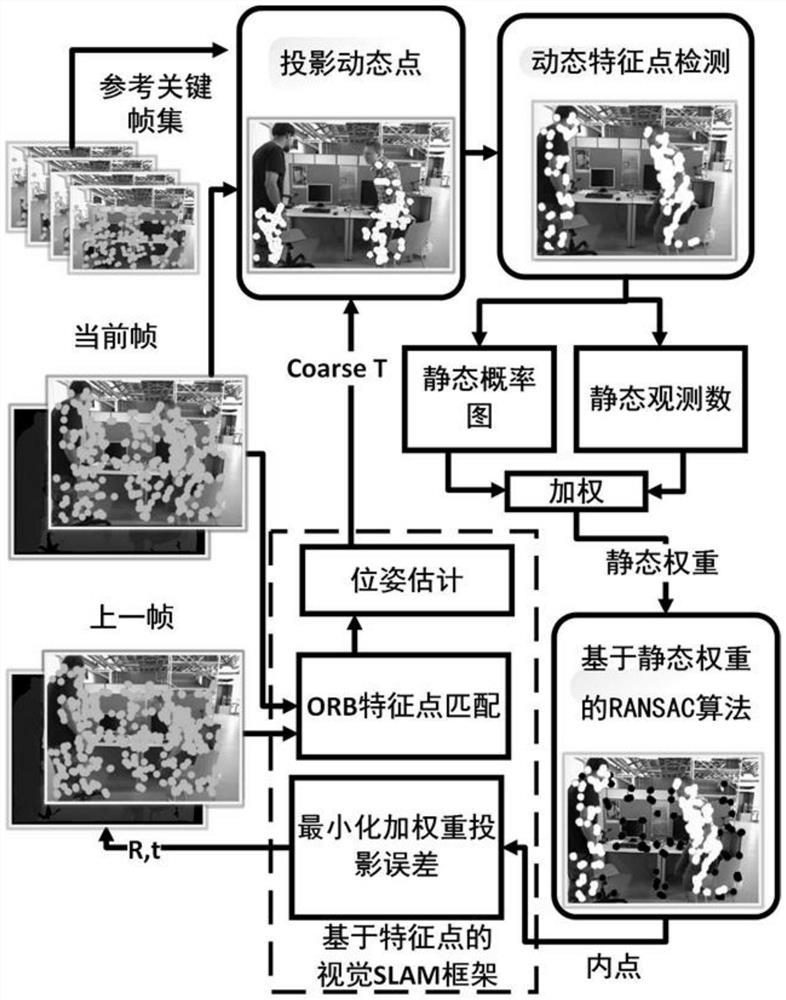
[0099] Such as figure 1 As shown, the present embodiment specifically discloses a SLAM method of an RGB-D camera in a dynamic scene, the method comprising the following steps:
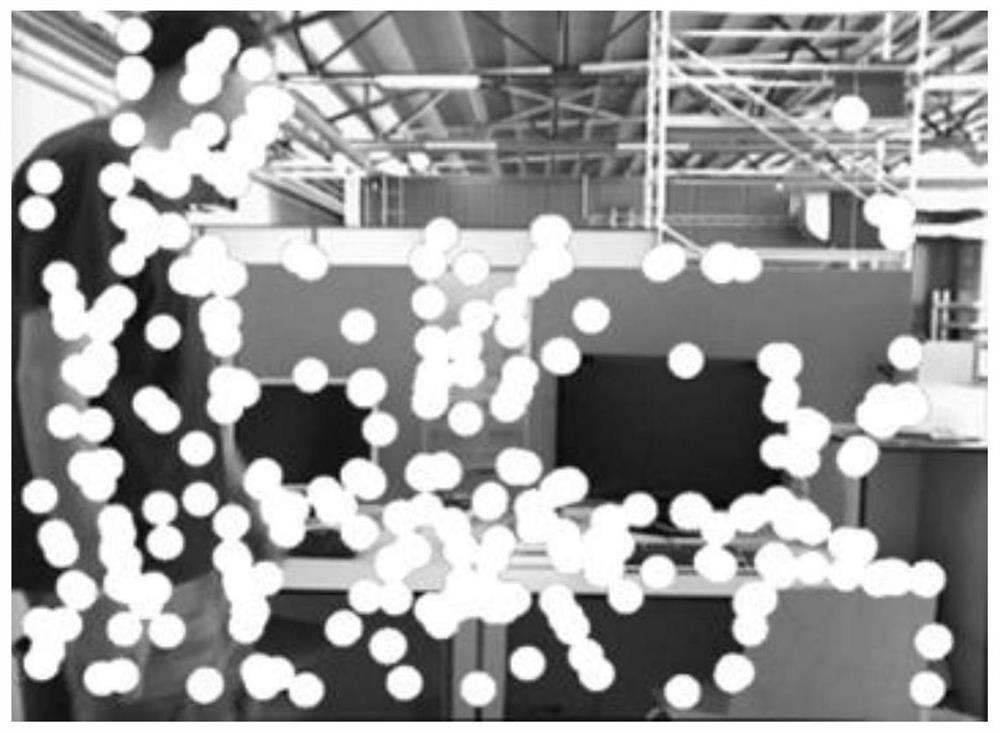
[0100] S1, ORB feature points (such as figure 2 As shown) extract and calculate the descriptor of the extracted ORB feature points, match the RGB image of the current frame with the RGB image of the previous frame, and initially calculate the pose of the current frame by minimizing the reprojection error;
[0101] S2. Compare the pose of the current frame with the poses of all key frames, try to find out the first m key frames whose poses are similar to the current frame and far from the current frame in time, and set them as reference key frames set, expressed as:
[0102]
[0103] Among them, a, b, c, d are constants greater than 0, id is the serial number of the key frame, id c is the serial number of the current frame, R is the rotation matrix of the key frame, t is the translation matrix of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More