

Steering wheel angle control method, device, equipment and storage medium
An angle control, steering wheel angle technology, applied in the computer field, can solve problems such as inflexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
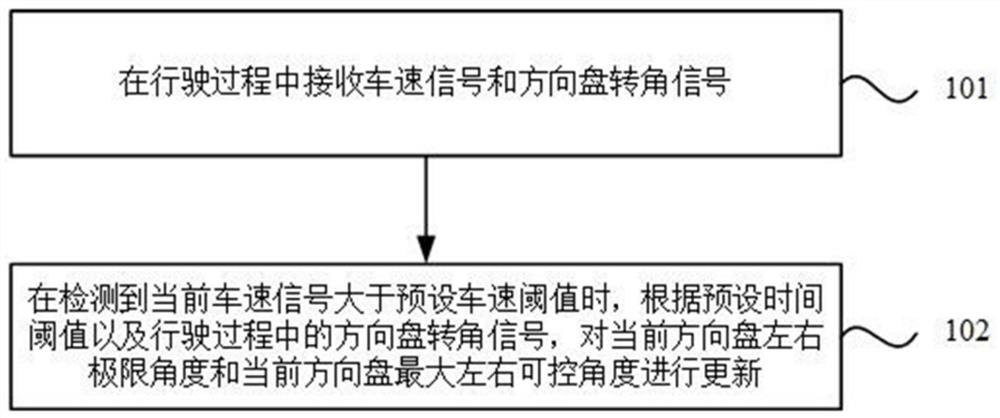
[0022] figure 1 It is a flow chart of a steering wheel angle control method provided by Embodiment 1 of the present invention. The embodiment of the present invention is applicable to the situation of controlling the controllable angle range of the steering wheel. The method can be executed by the steering wheel angle control device provided in the embodiment of the present invention. The device can be implemented in the form of software and / or hardware, and generally can be integrated in computer equipment. For example, the APA controller. Such as figure 1 As shown, the method of the embodiment of the present invention specifically includes:
[0023] Step 101, receiving a vehicle speed signal and a steering wheel angle signal during driving.
[0024] Wherein, the driving process refers to a process in which the driver manually controls the steering wheel to drive the vehicle. The vehicle speed signal includes the specific value of the current vehicle speed, which can be ...
Embodiment 2
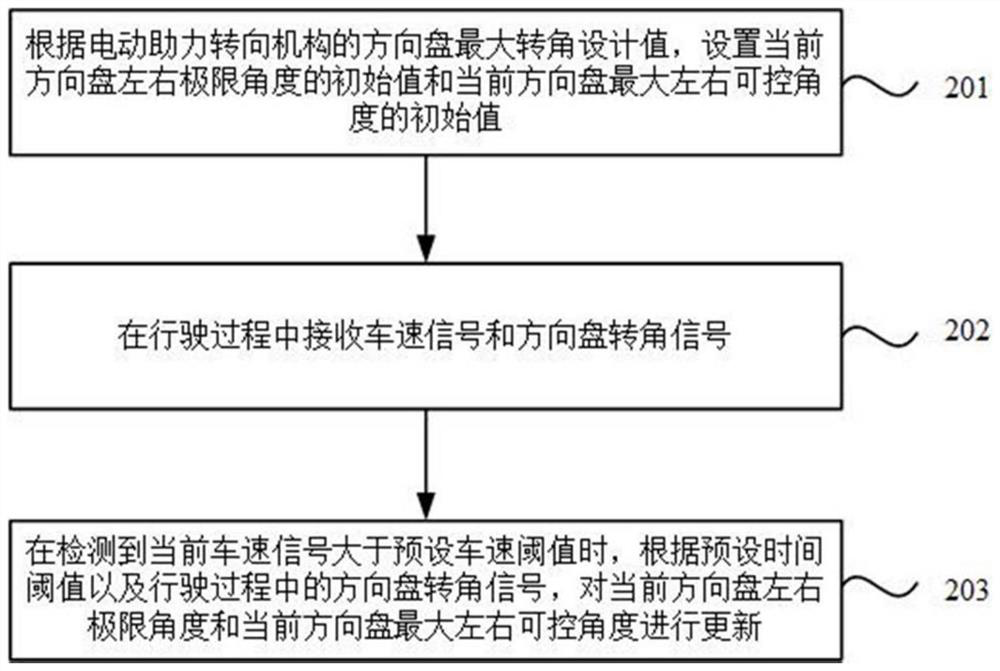
[0046] figure 2 It is a flowchart of a steering wheel angle control method provided by Embodiment 2 of the present invention. The embodiment of the present invention can be combined with each optional solution in the above one or more embodiments. In the embodiment of the present invention, the steering wheel angle control method may further include: setting the current steering wheel angle according to the design value of the maximum steering wheel angle of the electric power steering mechanism. The initial value of the left and right limit angle and the initial value of the maximum left and right controllable angle of the current steering wheel.
[0047] Such as figure 2 As shown, the method of the embodiment of the present invention specifically includes:
[0048] Step 201 , according to the design value of the maximum steering wheel angle of the electric power steering mechanism, the initial value of the current steering wheel left and right limit angle and the initial...
Embodiment 3
[0063] image 3 A schematic structural diagram of a steering wheel angle control device provided in Embodiment 3 of the present invention, as shown in image 3 As shown, the device includes: a signal receiving module 311 and an angle updating module 312 .
[0064] Among them, the signal receiving module 311 is used to receive the vehicle speed signal and the steering wheel angle signal during driving; the angle update module 312 is used to detect the current vehicle speed signal is greater than the preset vehicle speed threshold, according to the preset time threshold and during driving. The steering wheel angle signal is used to update the current steering wheel left and right limit angles and the current steering wheel maximum left and right controllable angles.
[0065] The embodiment of the present invention provides a steering wheel angle control device. By detecting the left and right rotation angles of the steering wheel in real time, the APA controller continuously lear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More