

A Polar Region Inertial Navigation Method Based on Virtual Sphere Normal Vector Model
An inertial navigation and normal vector technology, applied in the field of polar inertial navigation based on the virtual spherical normal vector model, can solve problems such as increased algorithm complexity, unguaranteed accuracy, and principled errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the spirit of the disclosure of the present invention will be clearly described below with the accompanying drawings and detailed descriptions. Any person skilled in the art will understand the embodiments of the present invention. , when it can be changed and modified by the technology taught in the content of the present invention, it does not depart from the spirit and scope of the content of the present invention. The exemplary embodiments and descriptions of the present invention are used to explain the present invention, but not to limit the present invention.
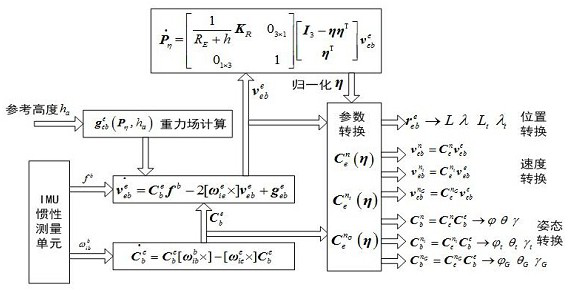
[0057] refer to figure 1 , the present embodiment provides a polar region inertial navigation method based on a virtual spherical normal vector, including:
[0058] Step 1: Binding the initial navigation parameters, receiving the real-time rotational angular velocity and specific force ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More