Unmanned aerial vehicle route planning method based on improved A* algorithm
A route planning and unmanned aerial vehicle technology, applied in navigation calculation tools, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problem that the A* algorithm cannot find the optimal path, etc., to achieve easy understanding, Calculate the effect of convenient and simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] For those skilled in the art, it is understandable that some well-known structures and their descriptions may be omitted in the description of the drawings. The present invention will be further described below in conjunction with the drawings and implementation steps.
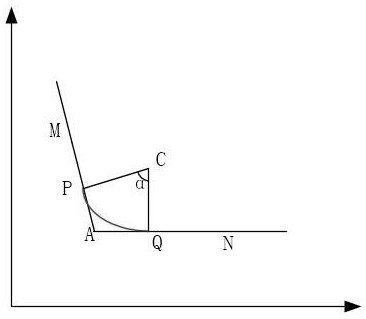
[0037] The present invention proposes to use the UAV path planning algorithm based on the improved A* algorithm to optimize the motion path, and to reduce the actual motion path trajectory length through operations such as enlargement and refinement of the path trajectory to achieve the purpose of reducing the path length.
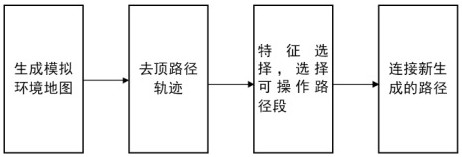
[0038] figure 1 This is the flow chart of the method of the present invention. Firstly, it generates a simulated environment map, performs modeling based on the information of the UAV motion scene, and generates the simulated environment map to be executed; then determines the path trajectory, and establishes the starting point of the UAV activity and The target point is to connect the r...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap