

Method for collecting finger bending state data
A bending state and finger technology, applied in the field of VR and robotics, can solve the problems of insufficient sensitivity, low comfort of wearing gloves, and inaccurate signal capture, etc., and achieve the effect of high acquisition sensitivity, simple structure, and high-precision acquisition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
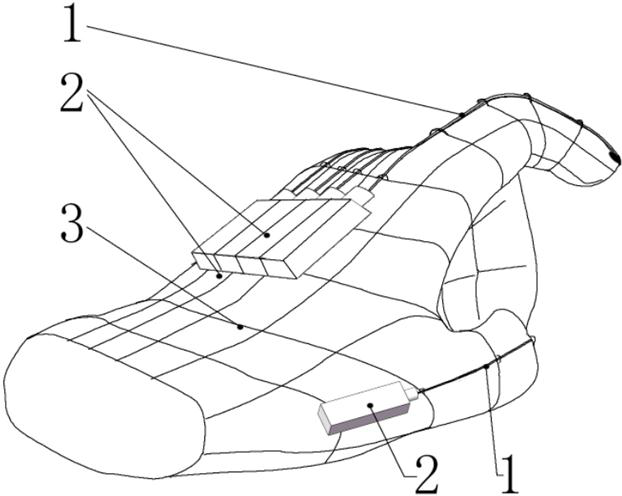
[0015] A method for collecting finger bending state data, which uses a self-resetting sliding potentiometer to follow changes in the bending length of the outer side of the finger, collects data generated by the self-resetting sliding potentiometer in real time, and uses the collected data to linearly correspond to the finger bending state.
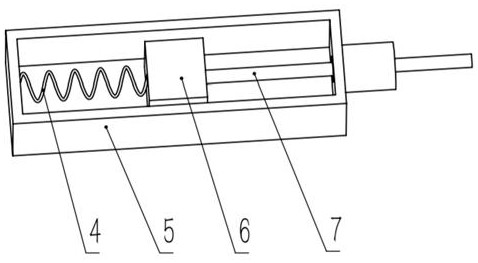
[0016] Such as figure 1 , 2 As shown, the self-resetting sliding potentiometer is fixed on the back of the glove, the drawstring is fixed along the outer layer of the finger back of the glove to the finger end of the glove, and the part of the drawstring on the back of the finger is limited by a sleeve or fiber The middle position on the outer side of the finger of the glove; the bending action of the finger drives the change of the length of the pull rope, thereby pulling the self-resetting sliding potentiometer to produce a sampling voltage change, and the two limit values of the self-resetting sliding potentiometer are correspondin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More