Grabbing mechanism for industrial intelligent robot
A technology of intelligent robot and grasping mechanism, which is applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems that the clamping claws cannot adapt to cylindrical materials, and the contact area between the clamping mechanism and the cylindrical surface is limited, so as to improve the gripping The effect of ease of handling and convenience of transportation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
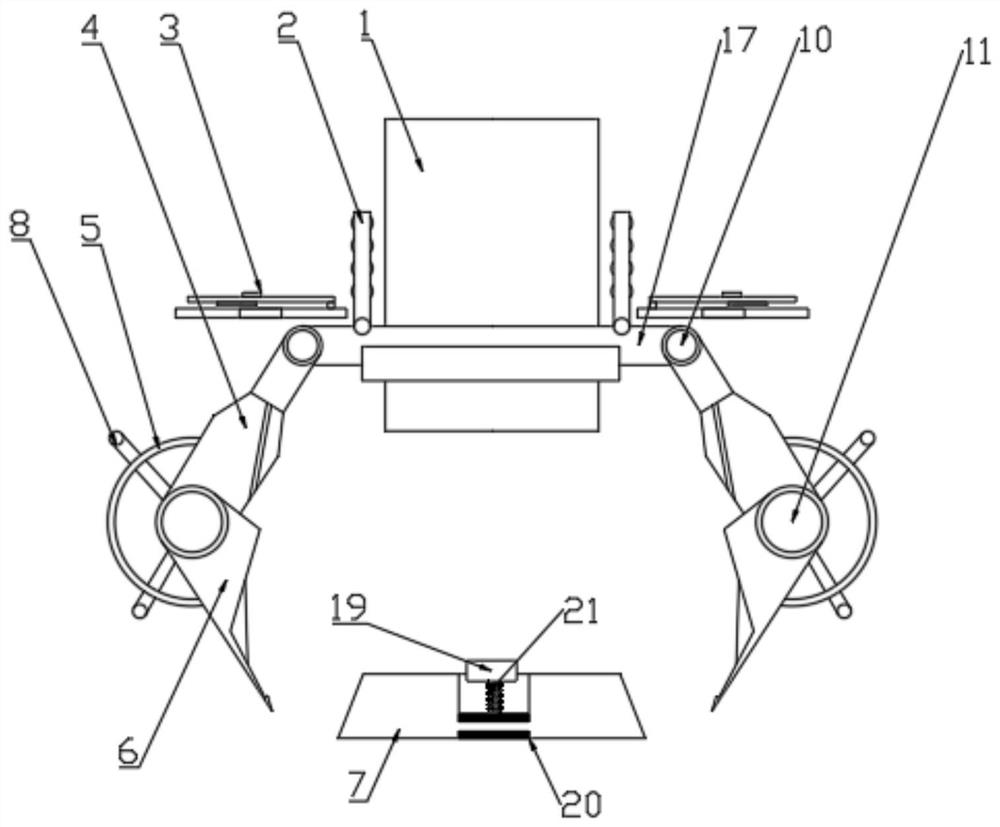
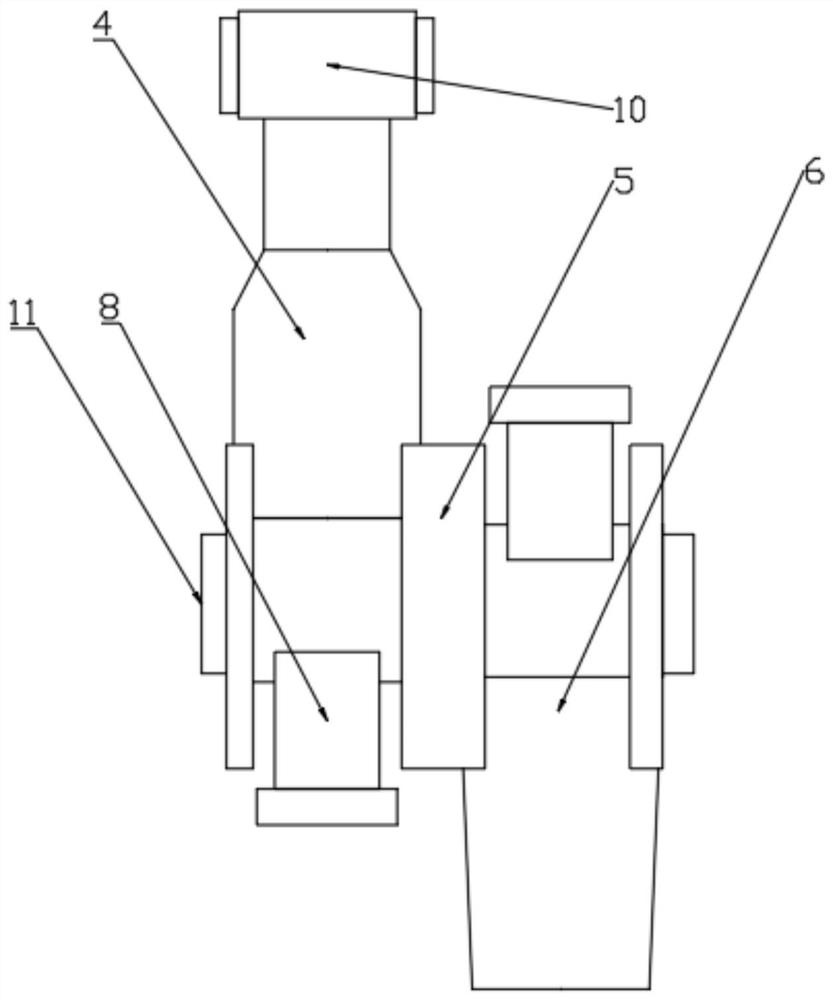
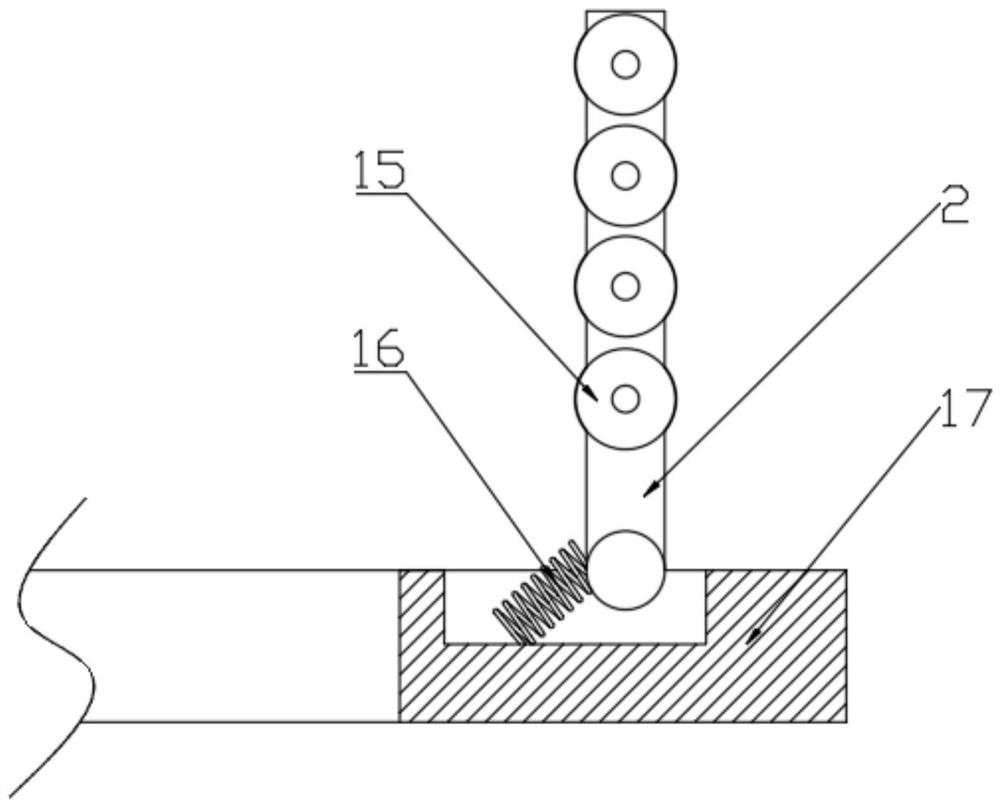
[0028] see Figure 1-8 , a grabbing mechanism for an industrial intelligent robot, including a jaw module and a limit frame 17, the jaw module is installed on the limit frame 17, the jaw module includes two sets of jaws, and the jaws include Connecting plate 4 and gripping claw 6, one end of described connecting plate 4 is hinged on the circumferential surface of limit frame 17 by first rotating shaft 10, and the other end is connected with gripping claw 6 by second rotating shaft 11 rotations; The inside of the position frame 17 is also rotatably connected with a material receiving plate 2, and the number of the material receiving plate 2 is two, and matches with two sets of jaws one by one, and the material receiving plate 2 is also stuck with a ball 15; And the material bearing plate 2 is also elastically connected with the limit frame 17 through the first spring 16; the load plate module for carrying the material 1 is arranged below the limit frame 17, and the dial for con...
Embodiment 2
[0036] In order to further improve the practical performance of this design, improvements have been added on the basis of Embodiment 1, the improvements are: please refer to Figure 1-8 , the connecting plate 4 and the clamping claw 6 are also provided with an angle measurement assembly, the angle measurement assembly includes a measuring frame 5 and a measuring mark 8, and there are two measuring marks 8, which are respectively fixedly connected to the connecting plate 4 and the clamping claw 6, the measuring frame 5 is fixedly connected to the clamping claw 6, and the measuring frame 5 is provided with a measuring scale.
[0037]When in use, observe the included angle between the two measuring marks 8 and record the reading of the included angle, so that the bottom area of the clamped material 1 can be estimated based on a large amount of data.
[0038] The loading plate module includes a backing plate 7, an elastic plate 19 and an induction lamp 18, the induction lamp 18 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com