

Unified direct-current coding method for position, speed, time and attitude information
A technology of posture information and coding method, which is applied in the field of communication, can solve problems such as difficult integration of interface circuits, heavy interface debugging workload, and many system communication lines, and achieve the effects of reducing workload, simplifying types, and realizing clock synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The present invention will be further explained below in conjunction with accompanying drawing and specific embodiment:
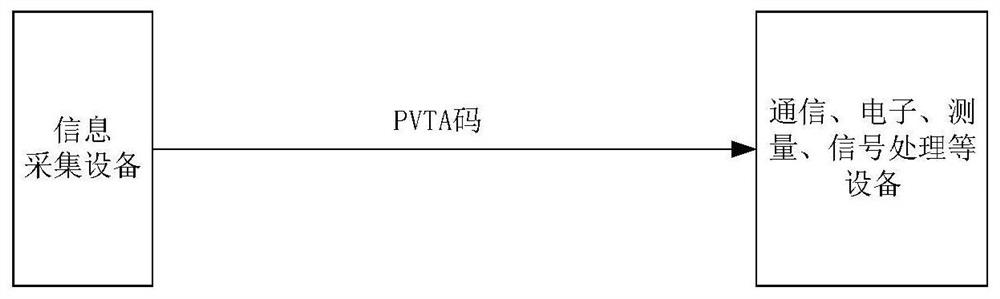
[0027] For the transmission of position, speed, time and attitude information using traditional information transmission methods, many types of data interfaces are required, and there are many corresponding drivers, which will cause many system communication lines, poor reliability, and a large workload for interface debugging. The interface circuit is not easy to integrate and so on. The present invention performs unified DC coding on the position, speed, time and attitude (PVTA) information, organically combines the position, speed, time and attitude information, and realizes the simultaneous transmission of the position, speed, time and attitude information, such as figure 2 shown.
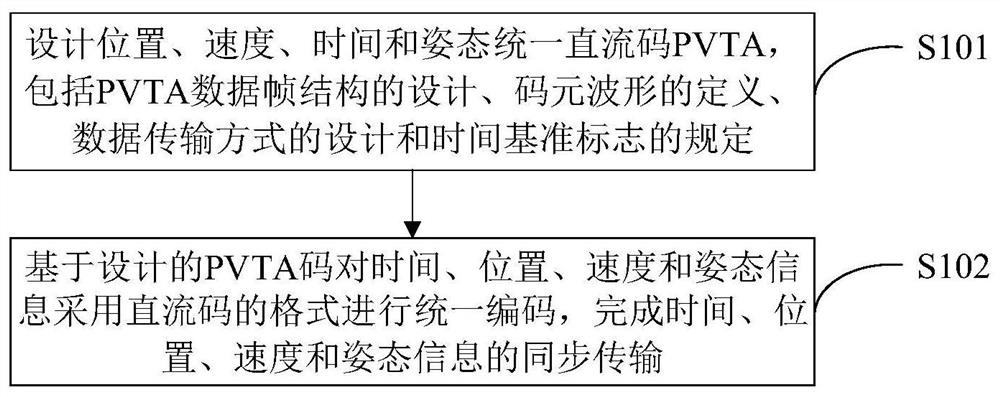
[0028] Such as image 3 As shown, a unified DC encoding method for position, velocity, time and attitude information, including:
[0029] Step S101: designing a u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More