

Quick automatic connecting device for mechanical arm end actuator
An end-execution and interface device technology, which is applied in the field of robotics, can solve the problems of robot grasping or completion of movement restrictions, and the inability to quickly replace, etc., to achieve the effect of automatic replacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0028]Example one
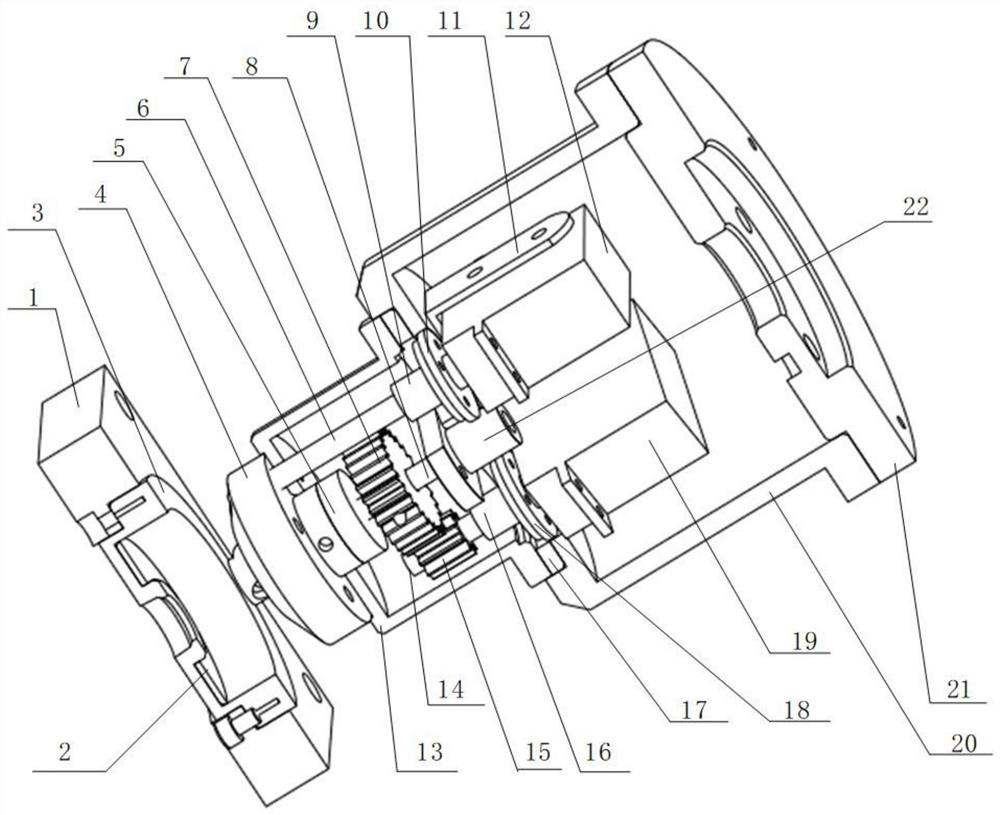
[0029]Such asfigure 1 As shown,figure 1 This is a structural view of the quick automatic interface device of the end effector of the robot arm; the quick automatic interface device of the end effector of the robot arm of the present invention includes a first matching part and a second matching part, the first matching part is installed on the robot arm On the end joint, the second matching part is installed on the surface of the end actuator of the robot arm, and the first matching part and the second matching part are clamped and fixed to realize the end joint of the robot arm and the robot arm Removable connection between end effectors.
[0030]The first matching part includes a male head, a transmission part, a tensioning steering gear 19, and a top wire steering gear 12. The tensioning steering gear 19 realizes the male head and the second cooperation through the transmission portion To unlock the part, the top wire steering gear 12 is connected to the male head t...
Example Embodiment
[0039]Example two
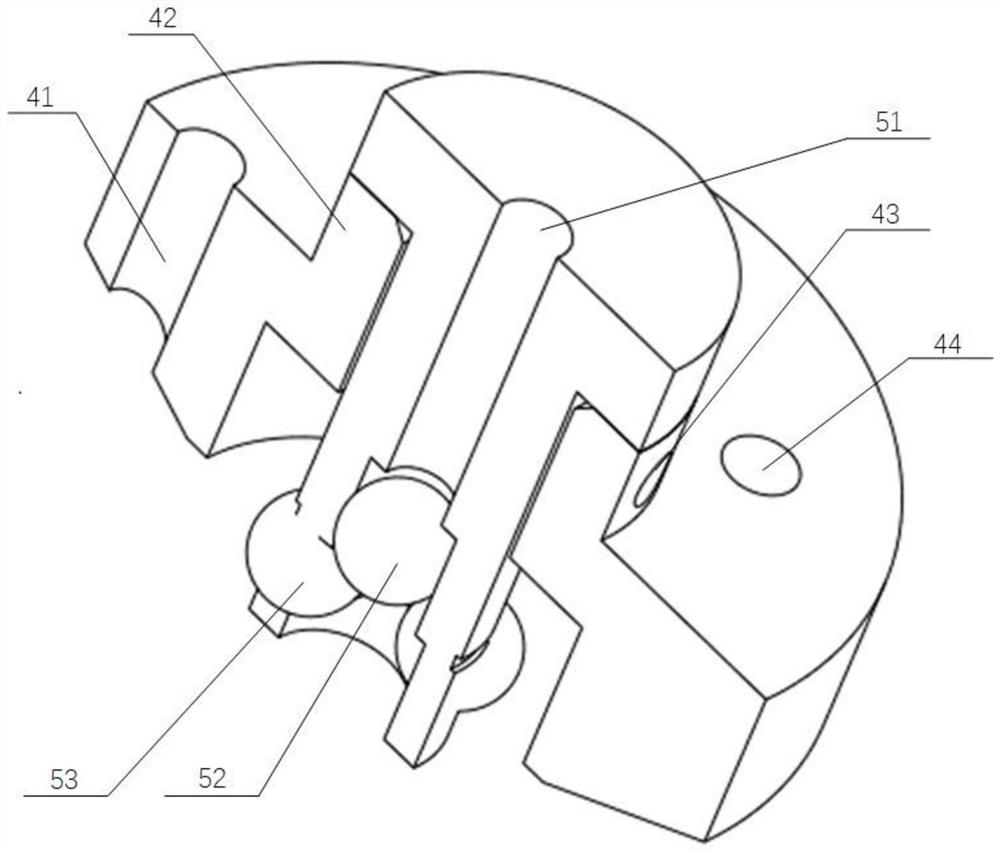
[0040]Such asFigure 4 As shown,Figure 4 This is a structural view of the transmission part; the transmission part also includes a driving gear 15, a driven gear 7, and a screw shaft 8. The driven gear 7 and the driving gear 15 are meshed and connected, and the driven gear 7 It is fixedly arranged on the screw shaft 8, the driving gear 15 is fixedly arranged on the output shaft of the tension steering gear 19, and the threaded end 81 of the screw shaft 8 is threadedly connected with the ball pin 5 , The optical shaft end 82 is provided with a flange linear bearing 22, and the flange linear bearing 22 is fixedly arranged. The driving gear 15 is driven to rotate by the tensioning steering gear 19, thereby driving the screw shaft 8 to rotate. Due to the threaded connection between the screw shaft 8 and the ball pin 5, the screw The shaft 8 and the ball pin 5 move relatively in the axial direction.
[0041]Specifically, the expansion steering wheel 18 of the expansion steer...
Example Embodiment
[0046]Example three
[0047]The first matching portion also includes a first motor cover 13, a second motor cover 20, a terminal adapter flange 21, and a rotating flange 17. The first motor cover 13 and the second motor cover 20 pass through the rotation The end adapter flange 21 is fixedly arranged on the second motor cover 20, and the end adapter flange 21 is fixedly connected to the end of the robot arm. The expansion steering gear 19 and the The top wire steering gear 12 is arranged in the second motor cover 20, the transmission part is arranged in the first motor cover 13, and the flange linear bearing 22 is fixedly arranged on the rotating flange 17.
[0048]The optical shaft end 82 of the screw shaft 8 is matedly connected with the bearing end 222 of the flange linear bearing 22, and the optical shaft end 82 of the screw shaft 8 can be rotated and connected in the flange linear bearing 22 Moving, the flange end 221 of the flange linear bearing 22 is fixedly arranged on the turn fla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More