

Point cloud layering method based on space sequence, point cloud prediction method and equipment
A prediction method and space technology, applied in the field of point cloud processing, can solve problems such as weak correlation, achieve the effect of accurate prediction value, improve correlation, and improve encoding and decoding performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0066] Example 1: Two-dimensional Neighbor Search in Double Morton Order Based on Spatial Order Point Cloud Prediction Method
[0067] In this embodiment, we use the two-dimensional point cloud and the two-dimensional Morton sequence as examples to illustrate the technical features more clearly, and the same technology can be applied to the three-dimensional point cloud. Such as Figure 5 As shown, 1-64 in the figure is the Morton order of the local space. There are 11 points in the point cloud, which are A, B, C, D, E, F, G, H, I, J, K, and the numbers Represents the Morton code sequence in the 3D point cloud. The point cloud is coded according to the Morton code sequence when encoding. Points with a Morton code sequence less than 49 are coded points and marked as circles. Points with a Morton code sequence greater than or equal to 49 The point is an uncoded point, marked as a triangle, and the next point to be coded is I. If the neighbors of point I to be encoded are searc...
Embodiment 2
[0069] Embodiment 2: Two-way search for neighbors in two-dimensional double Hilbert order order based on the point cloud prediction method of spatial order
[0070] In this embodiment, we use two-dimensional point cloud and two-dimensional Hilbert order as examples, Figure 7 is a schematic diagram of the Hilbert order in two-dimensional space, in order to illustrate the characteristics of this technology more clearly, and the same technology can be applied to three-dimensional point clouds. Such as Figure 8 As shown, 1-64 in the figure is the Hilbert order of the local space. The point cloud has 12 points in total. The numbers represent the Hilbert order in the 3D point cloud, and the encoding is done according to the Hilbert order. The point cloud is encoded. The points with Hilbert order less than 54 are encoded points and marked as circles. The points with Hilbert order greater than or equal to 54 are unencoded points and marked as triangles. The next point that needs to...
Embodiment 3
[0072] Example 3: A point cloud prediction method based on spatial order to find neighbors in two directions in two-dimensional Morton order in 3D
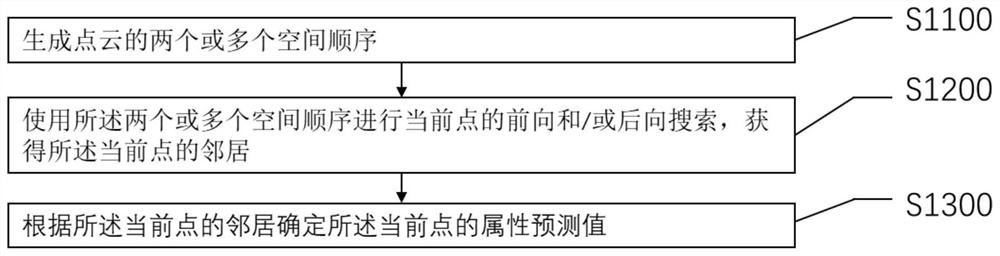
[0073] In this embodiment, we use the 3D point cloud and the 3D Morton sequence as examples to illustrate the technical features more clearly. Such as figure 1 As shown, first generate two or more spatial sequences of the point cloud, and calculate the Morton code of all points in the point cloud. The Morton code of the point cloud is obtained by arranging the three-dimensional coordinates of the point cloud from high to low. For example, for a point whose three-dimensional coordinates are (1,2,0), its three-dimensional binary representation is 01, 10, and 00, and its generated Morton code is 010100. After generating the Morton codes of all points in the point cloud, sort according to the size of the Morton codes to obtain the Morton order of all points. Such as Figure 10 As shown, 0-31 in the figure is the Morton order of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More