Flexible grabbing method of flexible pneumatic robot
A robot and flexible technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of poor versatility and high cost of use of gripping equipment, and achieve the effects of convenient and quick replacement, large gripping force, and reduced cost of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the implementation scope of the present invention is not limited thereto.
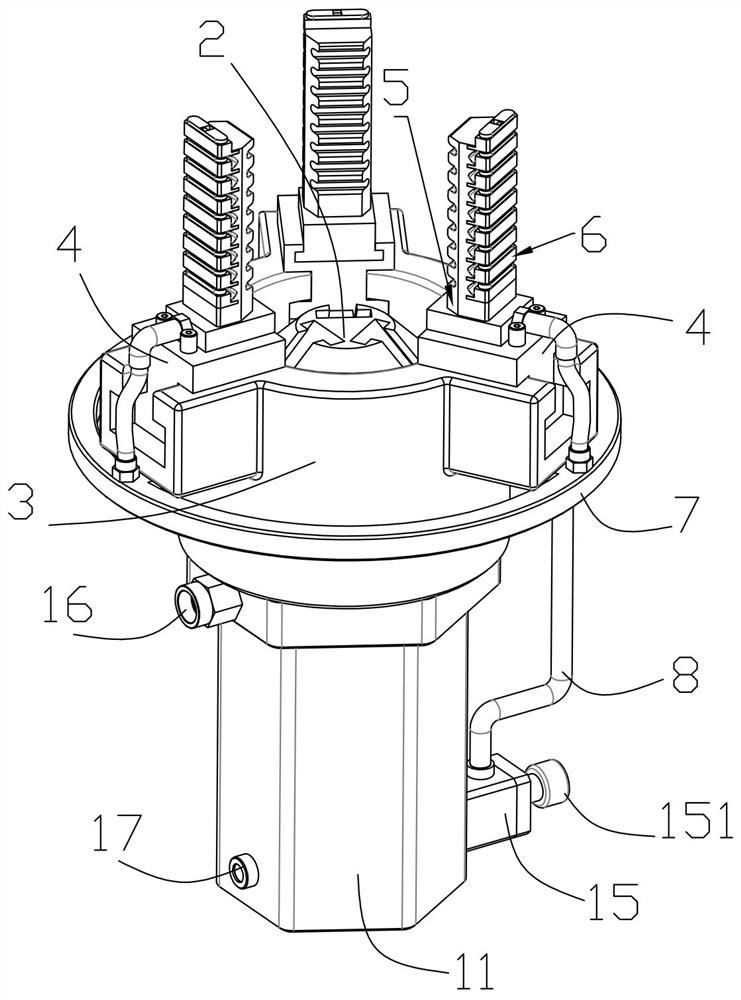
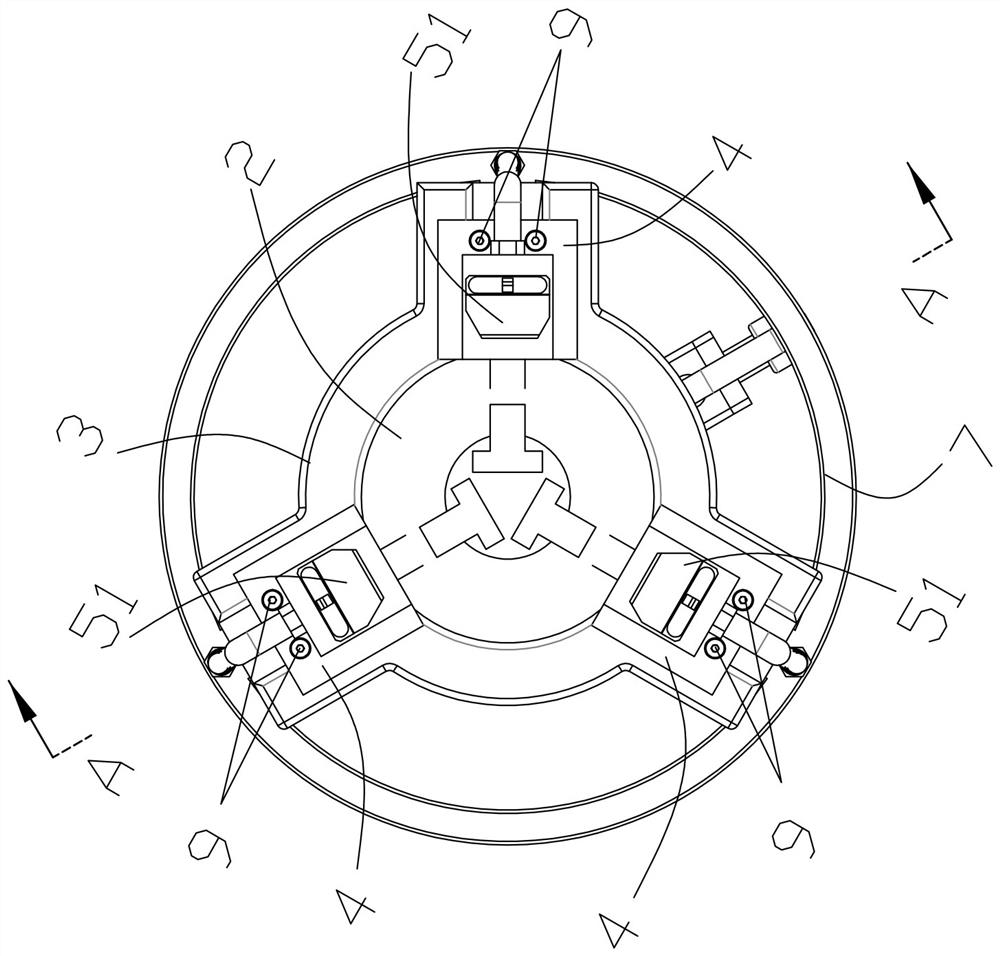
[0030] Such as Figure 1 to Figure 13 As shown, the flexible grasping method of a flexible pneumatic robot described in this embodiment includes a power cylinder 1, a tapered slide table 2 and a guide tube seat 3; the power cylinder 1 includes a cylinder body 11, a piston rod 12 , cylinder end cover 13, back-moving spring 14, overflow valve 15, air pipe joint 16 and intake check valve 17, described cylinder end cover 13 is fixed on one end of cylinder body 11, and described cylinder end cover 13 and cylinder body 11 A cylinder chamber is formed between them, and the piston rod 12 is arranged in the cylinder chamber, and the cylinder chamber is divided into an upper chamber and a lower chamber by the piston rod 12, and one end of the piston rod 12 passes thro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More