

Mobile equipment positioning method based on multi-sensor coupling
A mobile device and positioning method technology, applied in the field of image recognition, can solve the problems of the actual deployment of autonomous mobile robots, regardless of how to generate a map, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
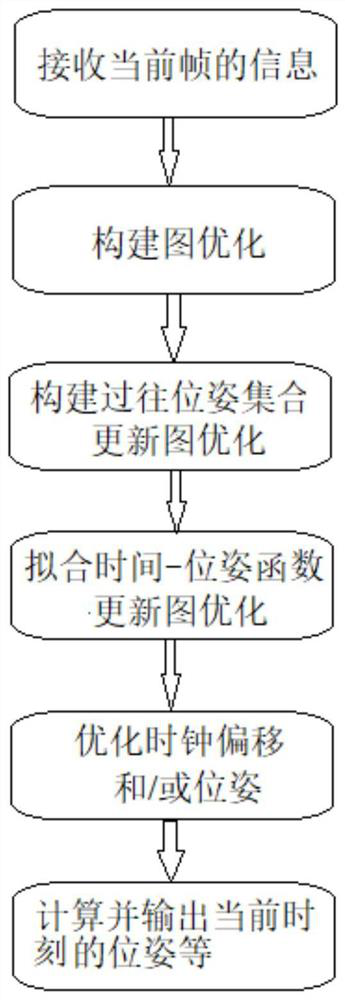
[0042]In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0043] In the present invention, the term "frame" refers to the data currently acquired by the sensor, such as a picture taken by a camera, a scanned point cloud, a measured acceleration of gravity, and the like. Pose includes horizontal and vertical coordinates and angles, and can also include vertical coordinates and pitch and roll.
[0044...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More